Enhanced Flexible Mold Lifetime for Roll‐to‐Roll Scaled‐Up Manufacturing of Adhesive Complex Microstructures
Bioinspired Microstructured Adhesives with Facile and Fast Switchability for Part Manipulation in Dry and Wet Conditions
Smart Materials for manipulation and actuation of small-scale structures
3D nanofabrication of various materials for advanced multifunctional microrobots
Liquid Crystal Mesophase of Supercooled Liquid Gallium And Eutectic Gallium–Indium
Machine Learning-Based Pull-off and Shear Optimal Adhesive Microstructures
Information entropy to detect order in self-organizing systems
Individual and collective manipulation of multifunctional bimodal droplets in three dimensions
Microrobot collectives with reconfigurable morphologies and functions
Self-organization in heterogeneous and non-reciprocal regime
Biomimetic Emulsion Systems
Giant Unilamellar Vesicles for Designing Cell-like Microrobots
Bioinspired self-assembled colloidal collectives drifting in three dimensions underwater
Magnetically actuated gearbox for the wireless control of millimeter-scale robots
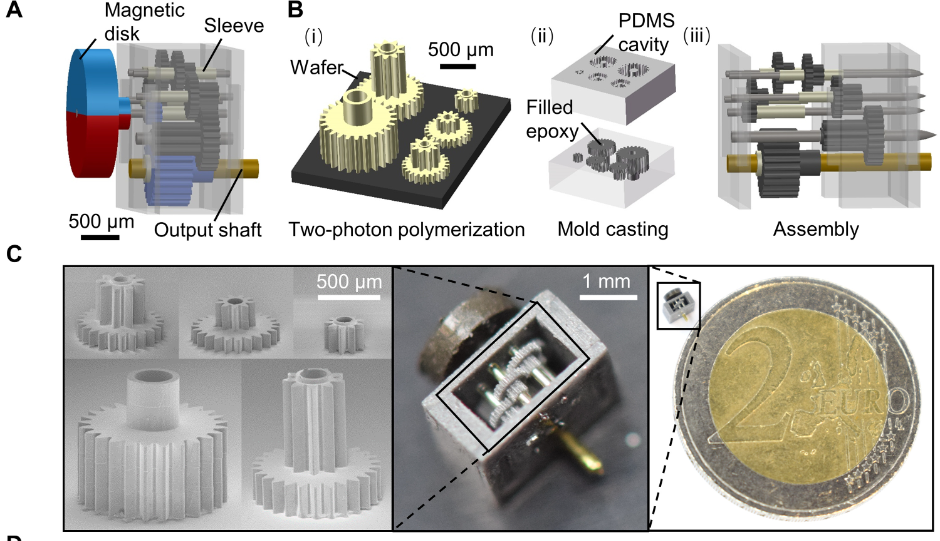
The limited force or torque outputs of miniature magnetic actuators constrain the locomotion performances and functionalities of magnetic millimeter-scale robots. Here, we present a magnetically actuated gearbox with a maximum size of 3 millimeters for driving wireless millirobots. The gearbox is assembled using microgears that have reference diameters down to 270 micrometers and are made of aluminum-filled epoxy resins through casting. With a magnetic disk attached to the input shaft, the gearbox can be driven by a rotating external magnetic field, which is not more than 6.8 millitesla, to produce torque of up to 0.182 millinewton meters at 40 hertz. The corresponding torque and power densities are 12.15 micronewton meters per cubic millimeter and 8.93 microwatt per cubic millimeter, respectively. The transmission efficiency of the gearbox in the air is between 25.1 and 29.2% at actuation frequencies ranging from 1 to 40 hertz, and it lowers when the gearbox is actuated in viscous liquids. This miniature gearbox can be accessed wirelessly and integrated with various functional modules to repeatedly generate large actuation forces, strains, and speeds; store energy in elastic components; and lock up mechanical linkages. These characteristics enable us to achieve a peristaltic robot that can crawl on a flat substrate or inside a tube, a jumping robot with a tunable jumping height, a clamping robot that can sample solid objects by grasping, a needle-puncture robot that can take samples from the inside of the target, and a syringe robot that can collect or release liquids.
Members



Publications