Enhanced Flexible Mold Lifetime for Roll‐to‐Roll Scaled‐Up Manufacturing of Adhesive Complex Microstructures
Bioinspired Microstructured Adhesives with Facile and Fast Switchability for Part Manipulation in Dry and Wet Conditions
Smart Materials for manipulation and actuation of small-scale structures
3D nanofabrication of various materials for advanced multifunctional microrobots
Liquid Crystal Mesophase of Supercooled Liquid Gallium And Eutectic Gallium–Indium
Machine Learning-Based Pull-off and Shear Optimal Adhesive Microstructures
Information entropy to detect order in self-organizing systems
Individual and collective manipulation of multifunctional bimodal droplets in three dimensions
Microrobot collectives with reconfigurable morphologies and functions
Self-organization in heterogeneous and non-reciprocal regime
Biomimetic Emulsion Systems
Giant Unilamellar Vesicles for Designing Cell-like Microrobots
Bioinspired self-assembled colloidal collectives drifting in three dimensions underwater
Versatile, modular, and customizable magnetic solid-droplet systems
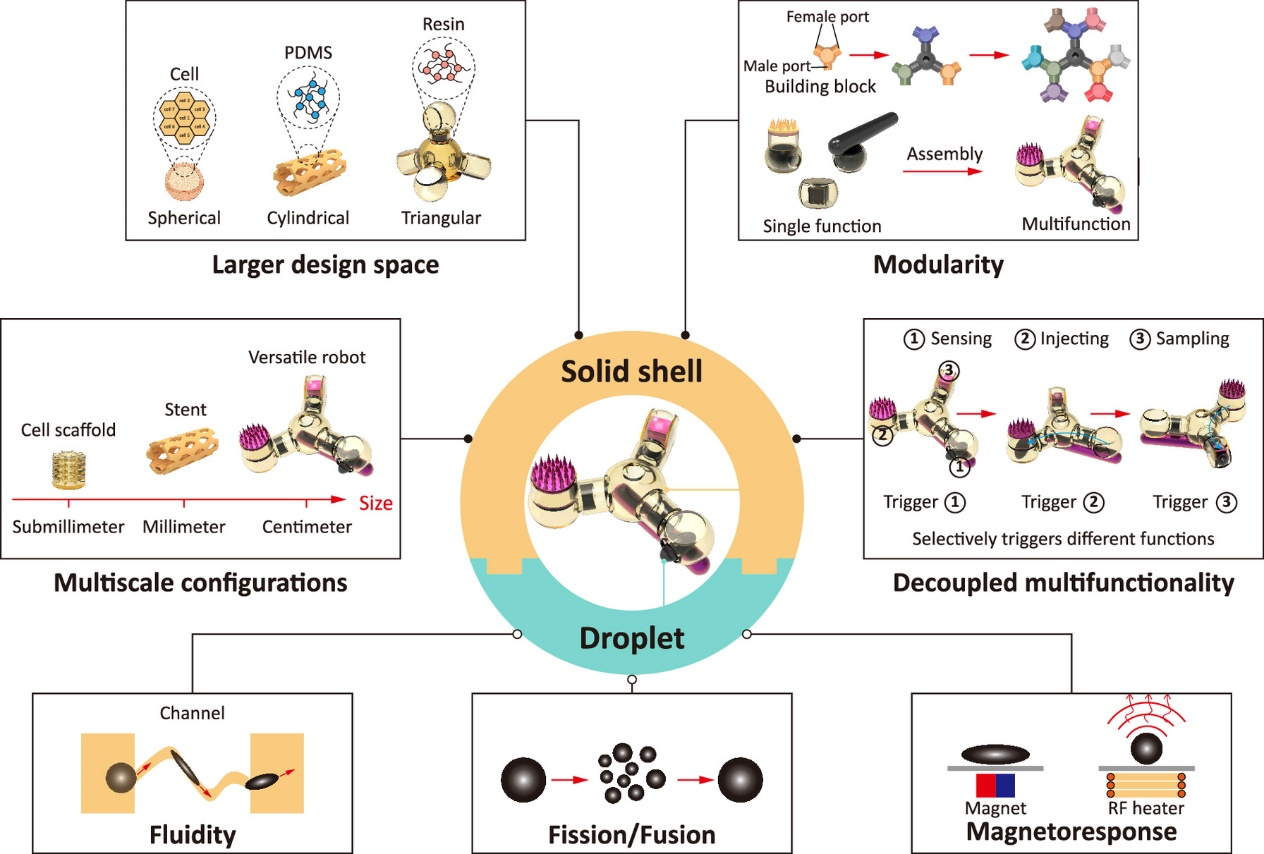
Magnetic miniature robotic systems have attracted broad research interest because of their precise maneuverability in confined spaces and adaptability to diverse environments, holding significant promise for applications in both industrial infrastructures and biomedical fields. However, the predominant construction methodology involves the preprogramming of magnetic components into the system’s structure. While this approach allows for intricate shape transformations, it exhibits limited flexibility in terms of reconfiguration and presents challenges when adapting to diverse materials, combining, and decoupling multiple functionalities. Here, we propose a construction strategy that facilitates the on-demand assembly of magnetic components, integrating ferrofluid droplets with the system’s structural body. This approach enables the creation of complex solid-droplet robotic systems across a spectrum of length scales, ranging from 0.8 mm to 1.5 cm. It offers a diverse selection of materials and structural configurations, akin to assembling components like building blocks, thus allowing for the seamless integration of various functionalities. Moreover, it incorporates decoupling mechanisms to enable selective control over multiple functions, leveraging the fluidity, fission/fusion, and magneto-responsiveness properties inherent in the ferrofluid. Various solid-droplet systems have validated the feasibility of this strategy. This study advances the complexity and functionality achievable in small-scale magnetic robots, augmenting their potential for future biomedical and other applications.
Members





Publications