Enhanced Flexible Mold Lifetime for Roll‐to‐Roll Scaled‐Up Manufacturing of Adhesive Complex Microstructures
Bioinspired Microstructured Adhesives with Facile and Fast Switchability for Part Manipulation in Dry and Wet Conditions
Smart Materials for manipulation and actuation of small-scale structures
3D nanofabrication of various materials for advanced multifunctional microrobots
Liquid Crystal Mesophase of Supercooled Liquid Gallium And Eutectic Gallium–Indium
Machine Learning-Based Pull-off and Shear Optimal Adhesive Microstructures
Information entropy to detect order in self-organizing systems
Individual and collective manipulation of multifunctional bimodal droplets in three dimensions
Microrobot collectives with reconfigurable morphologies and functions
Self-organization in heterogeneous and non-reciprocal regime
Biomimetic Emulsion Systems
Giant Unilamellar Vesicles for Designing Cell-like Microrobots
Bioinspired self-assembled colloidal collectives drifting in three dimensions underwater
Wireless soft millirobots for climbing three-dimensional surfaces in confined spaces
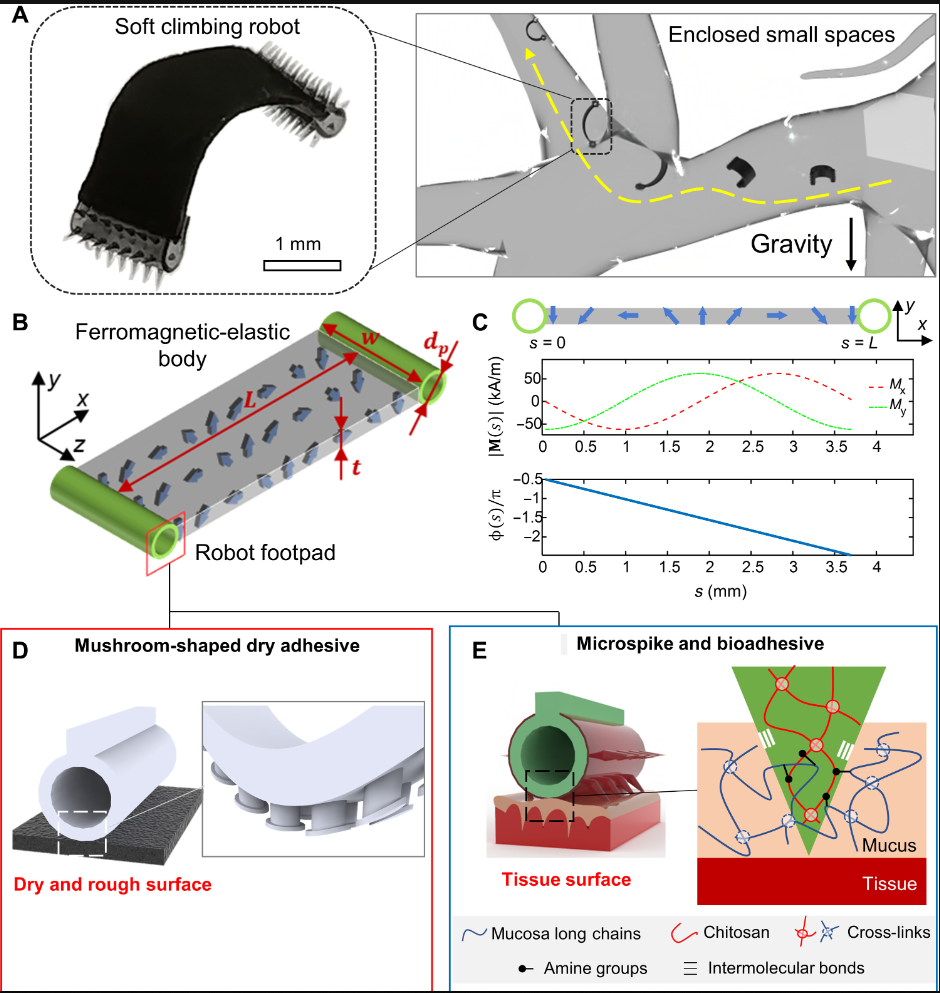
Wireless soft-bodied robots at the millimeter scale allow traversing very confined unstructured terrains with minimal invasion and safely interacting with the surrounding environment. However, existing untethered soft millirobots still lack the ability of climbing, reversible controlled surface adhesion, and long-term retention on unstructured three-dimensional (3D) surfaces, limiting their use in biomedical and environmental applications. Here, we report a fundamental peeling-and-loading mechanism to allow untethered soft-bodied robots to climb 3D surfaces by using both the soft-body deformation and whole-body motion of the robot under external magnetic fields. This generic mechanism is implemented with different adhesive robot footpad designs, allowing vertical and inverted surface climbing on diverse 3D surfaces with complex geometries and different surface properties. With the unique robot footpad designs that integrate microstructured adhesives and tough bioadhesives, the soft climbing robot could achieve controllable adhesion and friction to climb 3D soft and wet surfaces including porcine tissues, which paves the way for future environmental inspection and minimally invasive medicine applications.
Members


Publications