Enhanced Flexible Mold Lifetime for Roll‐to‐Roll Scaled‐Up Manufacturing of Adhesive Complex Microstructures
Bioinspired Microstructured Adhesives with Facile and Fast Switchability for Part Manipulation in Dry and Wet Conditions
Smart Materials for manipulation and actuation of small-scale structures
3D nanofabrication of various materials for advanced multifunctional microrobots
Liquid Crystal Mesophase of Supercooled Liquid Gallium And Eutectic Gallium–Indium
Machine Learning-Based Pull-off and Shear Optimal Adhesive Microstructures
Information entropy to detect order in self-organizing systems
Individual and collective manipulation of multifunctional bimodal droplets in three dimensions
Microrobot collectives with reconfigurable morphologies and functions
Self-organization in heterogeneous and non-reciprocal regime
Biomimetic Emulsion Systems
Giant Unilamellar Vesicles for Designing Cell-like Microrobots
Bioinspired self-assembled colloidal collectives drifting in three dimensions underwater
Magnetically steerable bacterial microrobots moving in 3D biological matrices for stimuli-responsive cargo delivery
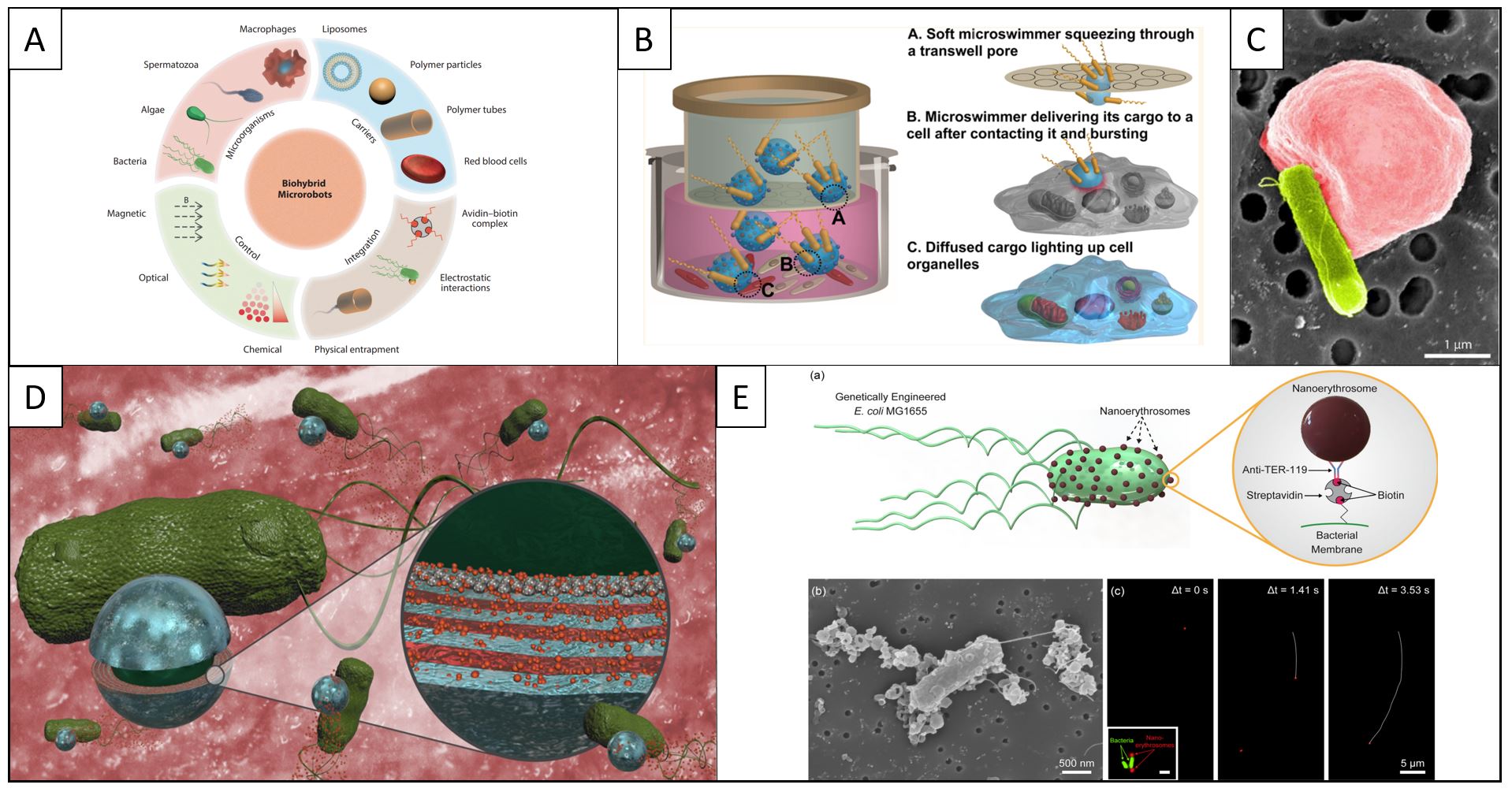
Bacterial biohybrids contribute to the field of microrobotics by combining self-propelling bacteria with micro/nanoscale materials for targeted and controlled drug delivery. However, the key challenge lies in the production of high-performing bacterial biohybrids that can integrate artificial units for active propulsion, maneuverability, and efficient drug delivery, without diminishing the natural motility of the bacteria. Addressing these challenges, we engineered a bacterial biohybrid microrobot that combines magnetic nanoparticles and nanoliposomes loaded with photothermal agents and chemotherapeutic molecules onto Escherichia coli bacteria. Our approach took advantage of noncovalent interactions for the attachment of materials on bacteria cells, thereby ensuring the intrinsic motility remains unaffected. Our design resulted in around 90% efficiency in creating biohybrids that retained their original swimming velocity of 18.5 μm/s. The biohybrids navigate through biological matrices, target tumor tissues under the control of an external magnetic field and release drugs upon near-infrared stimulus. Our study illustrates the potential of multifunctional biohybrid microrobots for drug delivery and provides a systematic and high-throughput platform for designing medical microrobots that can overcome biological barriers and perform stimuli-responsive active therapeutic release.
Members





Publications