Quantifying the Quality of Haptic Interfaces
Shape-Changing Haptic Interfaces
Generating Clear Vibrotactile Cues with Magnets Embedded in a Soft Finger Sheath
Salient Full-Fingertip Haptic Feedback Enabled by Wearable Electrohydraulic Actuation
Cutaneous Electrohydraulic (CUTE) Wearable Devices for Pleasant Broad-Bandwidth Haptic Cues
Modeling Finger-Touchscreen Contact during Electrovibration
Perception of Ultrasonic Friction Pulses
Vibrotactile Playback for Teaching Sensorimotor Skills in Medical Procedures
CAPT Motor: A Two-Phase Ironless Motor Structure
4D Intraoperative Surgical Perception: Anatomical Shape Reconstruction from Multiple Viewpoints
Visual-Inertial Force Estimation in Robotic Surgery
Enhancing Robotic Surgical Training
AiroTouch: Naturalistic Vibrotactile Feedback for Large-Scale Telerobotic Assembly
Optimization-Based Whole-Arm Teleoperation for Natural Human-Robot Interaction
Finger-Surface Contact Mechanics in Diverse Moisture Conditions
Computational Modeling of Finger-Surface Contact
Perceptual Integration of Contact Force Components During Tactile Stimulation
Dynamic Models and Wearable Tactile Devices for the Fingertips
Novel Designs and Rendering Algorithms for Fingertip Haptic Devices
Dimensional Reduction from 3D to 1D for Realistic Vibration Rendering
Prendo: Analyzing Human Grasping Strategies for Visually Occluded Objects
Learning Upper-Limb Exercises from Demonstrations
Minimally Invasive Surgical Training with Multimodal Feedback and Automatic Skill Evaluation
Efficient Large-Area Tactile Sensing for Robot Skin
Haptic Feedback and Autonomous Reflexes for Upper-limb Prostheses
Gait Retraining
Modeling Hand Deformations During Contact
Intraoperative AR Assistance for Robot-Assisted Minimally Invasive Surgery
Immersive VR for Phantom Limb Pain
Visual and Haptic Perception of Real Surfaces
Haptipedia
Gait Propulsion Trainer
TouchTable: A Musical Interface with Haptic Feedback for DJs
Exercise Games with Baxter
Intuitive Social-Physical Robots for Exercise
How Should Robots Hug?
Hierarchical Structure for Learning from Demonstration
Fabrication of HuggieBot 2.0: A More Huggable Robot
Learning Haptic Adjectives from Tactile Data
Feeling With Your Eyes: Visual-Haptic Surface Interaction
S-BAN
General Tactile Sensor Model
Insight: a Haptic Sensor Powered by Vision and Machine Learning
Biodegradable electrohydraulic actuators for sustainable soft robots
Ellen Rumley, Alona Shagan Shomron, Philipp Rothemund, Zachary Yoder, Benjamin Karrer, Christoph Keplinger et. al., Science Advances, 2023 [![]() ]
]
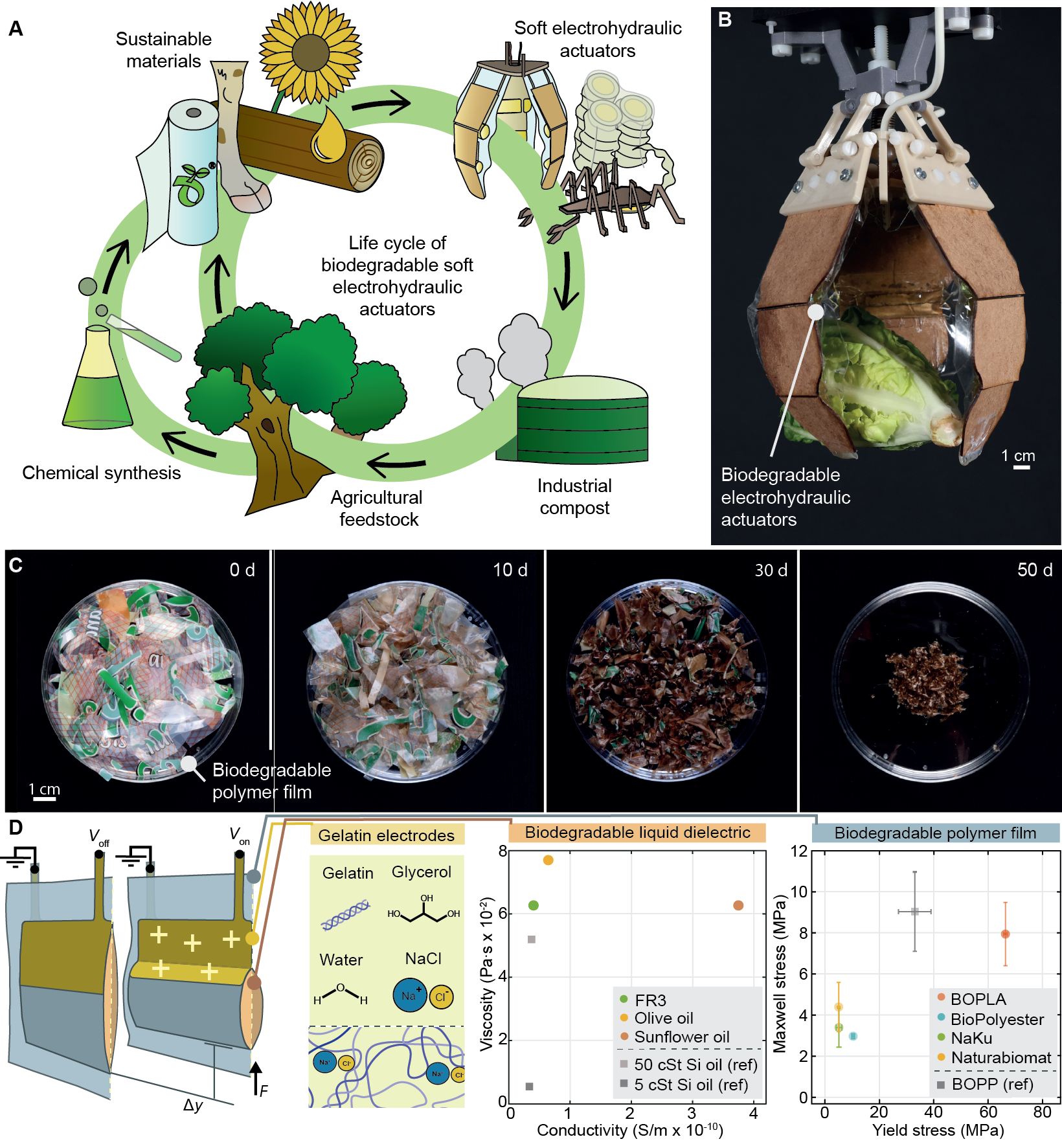
Combating environmental pollution demands a focus on sustainability, in particular from rapidly advancing technologies that are poised to be ubiquitous in modern societies. Among these, soft robotics promises to replace conventional rigid machines for applications requiring adaptability and dexterity. For key components of soft robots, such as soft actuators, it is thus important to explore sustainable options like bioderived and biodegradable materials.
In this project, we introduced a strategy to identify materials systems, so as to fabricate fully biodegradable and high-performance electrohydraulic soft actuators. The material components of our actuators are biodegradable polymer films, ester-based liquid dielectric, and NaCl-infused gelatin hydrogel. These biodegradable soft actuators reliably operate up to electric fields of 200 V/μm, perform competitively to their nonbiodegradable counterparts, and exceed 100,000 actuation cycles without signs of electrical failure.
We demonstrate the capabilities of biodegradable electrohydraulic soft actuators in robotic applications by fabricating them into a single-use robotic gripper compatible with commercial robot arms that is capable of sorting trash into recycling bins. We show that commercial biodegradable materials designed for food packaging already boast sufficient dielectric properties for use in high-voltage applications, which serves to motivate the tailoring of biodegradable materials as high-performance dielectrics, and well as encourages the wider implementation of biodegradables in soft robotic systems.
Video
Members





Publications