Quantifying the Quality of Haptic Interfaces
Shape-Changing Haptic Interfaces
Generating Clear Vibrotactile Cues with Magnets Embedded in a Soft Finger Sheath
Salient Full-Fingertip Haptic Feedback Enabled by Wearable Electrohydraulic Actuation
Cutaneous Electrohydraulic (CUTE) Wearable Devices for Pleasant Broad-Bandwidth Haptic Cues
Modeling Finger-Touchscreen Contact during Electrovibration
Perception of Ultrasonic Friction Pulses
Vibrotactile Playback for Teaching Sensorimotor Skills in Medical Procedures
CAPT Motor: A Two-Phase Ironless Motor Structure
4D Intraoperative Surgical Perception: Anatomical Shape Reconstruction from Multiple Viewpoints
Visual-Inertial Force Estimation in Robotic Surgery
Enhancing Robotic Surgical Training
AiroTouch: Naturalistic Vibrotactile Feedback for Large-Scale Telerobotic Assembly
Optimization-Based Whole-Arm Teleoperation for Natural Human-Robot Interaction
Finger-Surface Contact Mechanics in Diverse Moisture Conditions
Computational Modeling of Finger-Surface Contact
Perceptual Integration of Contact Force Components During Tactile Stimulation
Dynamic Models and Wearable Tactile Devices for the Fingertips
Novel Designs and Rendering Algorithms for Fingertip Haptic Devices
Dimensional Reduction from 3D to 1D for Realistic Vibration Rendering
Prendo: Analyzing Human Grasping Strategies for Visually Occluded Objects
Learning Upper-Limb Exercises from Demonstrations
Minimally Invasive Surgical Training with Multimodal Feedback and Automatic Skill Evaluation
Efficient Large-Area Tactile Sensing for Robot Skin
Haptic Feedback and Autonomous Reflexes for Upper-limb Prostheses
Gait Retraining
Modeling Hand Deformations During Contact
Intraoperative AR Assistance for Robot-Assisted Minimally Invasive Surgery
Immersive VR for Phantom Limb Pain
Visual and Haptic Perception of Real Surfaces
Haptipedia
Gait Propulsion Trainer
TouchTable: A Musical Interface with Haptic Feedback for DJs
Exercise Games with Baxter
Intuitive Social-Physical Robots for Exercise
How Should Robots Hug?
Hierarchical Structure for Learning from Demonstration
Fabrication of HuggieBot 2.0: A More Huggable Robot
Learning Haptic Adjectives from Tactile Data
Feeling With Your Eyes: Visual-Haptic Surface Interaction
S-BAN
General Tactile Sensor Model
Insight: a Haptic Sensor Powered by Vision and Machine Learning
Modeling Hand Deformations During Contact
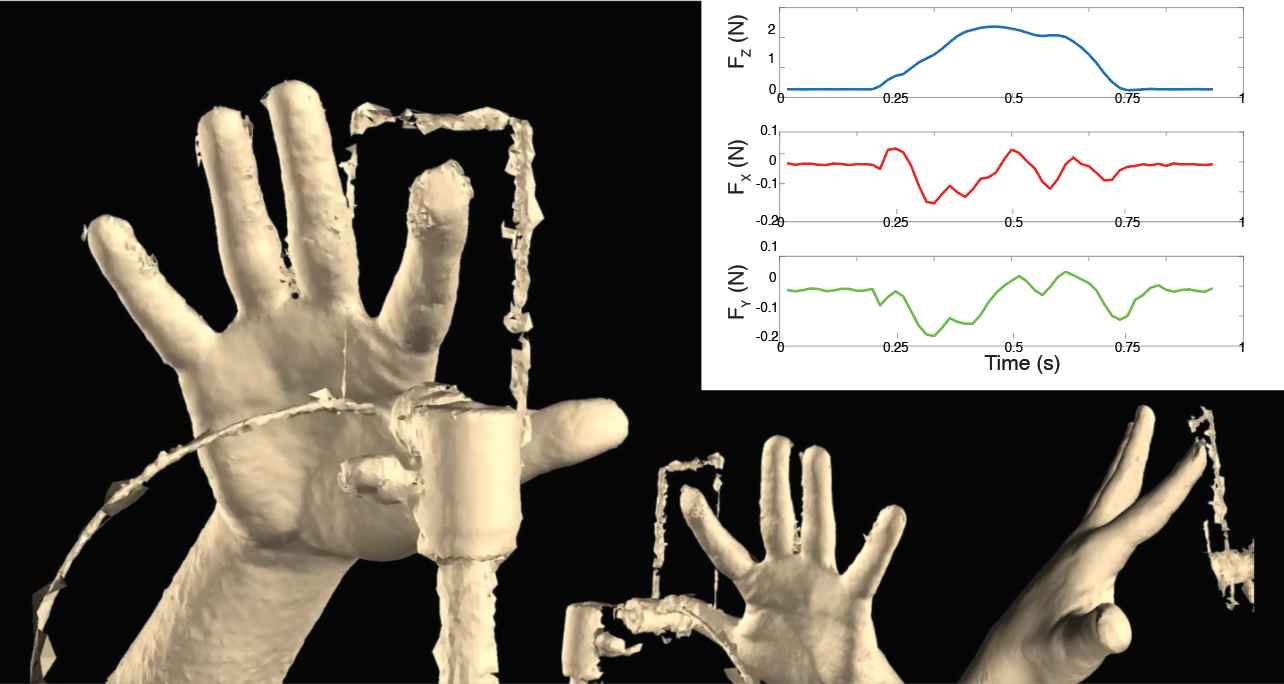
Little is known about the shape and properties of the human finger during haptic interaction, as such situations are difficult to instrument. Interestingly, these parameters are essential for designing and controlling wearable haptic finger devices and for delivering realistic tactile feedback with such devices. For example, there is currently no standard model of the fingertip’s shape and its potential variations across the population. Interaction-dependent deformations have also not yet been modeled.
This project explores a framework for four-dimensional scanning (3D shape over time) and modelling of finger-surface interactions, aiming to capture the motion and deformations of the entire finger with high resolution while simultaneously recording the interfacial forces at the contact. We are currently capturing the deformations of the fingertip during active pressing on a rigid surface, which is a first step toward an accurate characterization of the shape and deformations of the physically interacting human hand and fingers [![]()
![]() ].
].
In the future, we would like to optimize the scanner configuration and capture a large number of surface-finger interactions from a range of participants that is representative of the general population. We believe that these data will enable the creation of a statistical model that simulates the natural behavior of the interacting finger.
An accurate model of the variations in finger properties across the human population could enable one to infer the user’s fingertip properties from scarce data obtained by lower resolution scanning. It may also be relevant for inferring the physical properties of the underlying tissue from observing the surface mesh deformations, as has been shown for body tissues. Further applications of this research include simulation of human grasping in virtual worlds that is consistent with our manipulation of real objects and estimation of the contact forces generated by the tactile interaction from the 4D data alone.
Members




Publications