Quantifying the Quality of Haptic Interfaces
Shape-Changing Haptic Interfaces
Generating Clear Vibrotactile Cues with Magnets Embedded in a Soft Finger Sheath
Salient Full-Fingertip Haptic Feedback Enabled by Wearable Electrohydraulic Actuation
Cutaneous Electrohydraulic (CUTE) Wearable Devices for Pleasant Broad-Bandwidth Haptic Cues
Modeling Finger-Touchscreen Contact during Electrovibration
Perception of Ultrasonic Friction Pulses
Vibrotactile Playback for Teaching Sensorimotor Skills in Medical Procedures
CAPT Motor: A Two-Phase Ironless Motor Structure
4D Intraoperative Surgical Perception: Anatomical Shape Reconstruction from Multiple Viewpoints
Visual-Inertial Force Estimation in Robotic Surgery
Enhancing Robotic Surgical Training
AiroTouch: Naturalistic Vibrotactile Feedback for Large-Scale Telerobotic Assembly
Optimization-Based Whole-Arm Teleoperation for Natural Human-Robot Interaction
Finger-Surface Contact Mechanics in Diverse Moisture Conditions
Computational Modeling of Finger-Surface Contact
Perceptual Integration of Contact Force Components During Tactile Stimulation
Dynamic Models and Wearable Tactile Devices for the Fingertips
Novel Designs and Rendering Algorithms for Fingertip Haptic Devices
Dimensional Reduction from 3D to 1D for Realistic Vibration Rendering
Prendo: Analyzing Human Grasping Strategies for Visually Occluded Objects
Learning Upper-Limb Exercises from Demonstrations
Minimally Invasive Surgical Training with Multimodal Feedback and Automatic Skill Evaluation
Efficient Large-Area Tactile Sensing for Robot Skin
Haptic Feedback and Autonomous Reflexes for Upper-limb Prostheses
Gait Retraining
Modeling Hand Deformations During Contact
Intraoperative AR Assistance for Robot-Assisted Minimally Invasive Surgery
Immersive VR for Phantom Limb Pain
Visual and Haptic Perception of Real Surfaces
Haptipedia
Gait Propulsion Trainer
TouchTable: A Musical Interface with Haptic Feedback for DJs
Exercise Games with Baxter
Intuitive Social-Physical Robots for Exercise
How Should Robots Hug?
Hierarchical Structure for Learning from Demonstration
Fabrication of HuggieBot 2.0: A More Huggable Robot
Learning Haptic Adjectives from Tactile Data
Feeling With Your Eyes: Visual-Haptic Surface Interaction
S-BAN
General Tactile Sensor Model
Insight: a Haptic Sensor Powered by Vision and Machine Learning
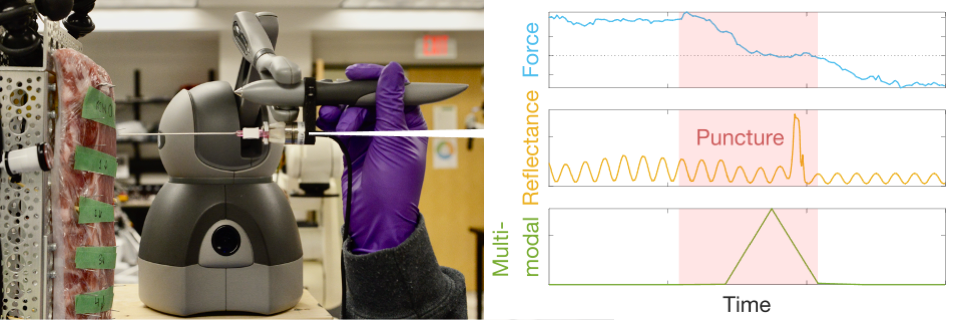
Multimodal Puncture Detection for Urgent Percutaneous Therapies
Illness or injury can cause fluids to accumulate between the chest wall and the lungs. In the absence of drainage, over-pressurization collapses the affected lung and compresses the heart until it can no longer pump blood. This condition is called a tension pneumothorax when the fluid is air, and it is fatal if left untreated. Urgent cases are vented using needle decompression (ND), where operators estimate the correct needle depth by feeling for a loss-of-resistance sensation on the needle. However, very high failure rates have been reported (94.1%), and complications include the accidental perforation of critical organs and vasculature.
To help medical professionals perform ND, this project seeks to identify reliable needle-puncture features in multimodal data streams measured with an instrumented needle. We cemented optical fibers inside a needle, and we mounted the sensorized needle on a haptic interface via a force/torque sensor. This setup enabled the collection of light reflected from the needle's tip during simulated ND, as well as the simultaneous measurement of needle forces, torques, positions, and orientations [![]() ]. Analyzing these rich data streams provides insight into needle-tissue interactions and underpins an investigation of puncture-detection algorithms.
]. Analyzing these rich data streams provides insight into needle-tissue interactions and underpins an investigation of puncture-detection algorithms.
Prior to this project, there were no publicly available data sets for ND. Given this lack of data and the challenges in collecting large data sets from human operators, we focussed on a class of extremely lightweight puncture-detection algorithms that identify events by thresholding sensor data streams. Other researchers have applied these algorithms to force data streams, but we explored applying them to each of our multimodal data streams, both alone [![]() ] and in combinations. We also developed novel puncture-detection algorithms belonging to this class [
] and in combinations. We also developed novel puncture-detection algorithms belonging to this class [![]() ].
].
Our experiments show that combining axial force and in-bore needle reflectance produces a five-fold improvement in puncture-detection performance, as compared to the traditional force-only approach. Furthermore, preliminary user study results suggest that algorithm-generated puncture-detection notifications can help human operators reduce their needle-tip overshoot beyond the target space [![]() ]. These promising outcomes support the future development of instrumented needles that provide medical professionals with puncture-detection assistance for ND.
]. These promising outcomes support the future development of instrumented needles that provide medical professionals with puncture-detection assistance for ND.
This research project involves collaborations with Anupam Bisht (University of Calgary), Kartikeya Murari (University of Calgary), Garnette Sutherland (University of Calgary), David Westwick (University of Calgary), and Linhui Yu (University of Calgary).
Members


Publications