Quantifying the Quality of Haptic Interfaces
Shape-Changing Haptic Interfaces
Generating Clear Vibrotactile Cues with Magnets Embedded in a Soft Finger Sheath
Salient Full-Fingertip Haptic Feedback Enabled by Wearable Electrohydraulic Actuation
Cutaneous Electrohydraulic (CUTE) Wearable Devices for Pleasant Broad-Bandwidth Haptic Cues
Modeling Finger-Touchscreen Contact during Electrovibration
Perception of Ultrasonic Friction Pulses
Vibrotactile Playback for Teaching Sensorimotor Skills in Medical Procedures
CAPT Motor: A Two-Phase Ironless Motor Structure
4D Intraoperative Surgical Perception: Anatomical Shape Reconstruction from Multiple Viewpoints
Visual-Inertial Force Estimation in Robotic Surgery
Enhancing Robotic Surgical Training
AiroTouch: Naturalistic Vibrotactile Feedback for Large-Scale Telerobotic Assembly
Optimization-Based Whole-Arm Teleoperation for Natural Human-Robot Interaction
Finger-Surface Contact Mechanics in Diverse Moisture Conditions
Computational Modeling of Finger-Surface Contact
Perceptual Integration of Contact Force Components During Tactile Stimulation
Dynamic Models and Wearable Tactile Devices for the Fingertips
Novel Designs and Rendering Algorithms for Fingertip Haptic Devices
Dimensional Reduction from 3D to 1D for Realistic Vibration Rendering
Prendo: Analyzing Human Grasping Strategies for Visually Occluded Objects
Learning Upper-Limb Exercises from Demonstrations
Minimally Invasive Surgical Training with Multimodal Feedback and Automatic Skill Evaluation
Efficient Large-Area Tactile Sensing for Robot Skin
Haptic Feedback and Autonomous Reflexes for Upper-limb Prostheses
Gait Retraining
Modeling Hand Deformations During Contact
Intraoperative AR Assistance for Robot-Assisted Minimally Invasive Surgery
Immersive VR for Phantom Limb Pain
Visual and Haptic Perception of Real Surfaces
Haptipedia
Gait Propulsion Trainer
TouchTable: A Musical Interface with Haptic Feedback for DJs
Exercise Games with Baxter
Intuitive Social-Physical Robots for Exercise
How Should Robots Hug?
Hierarchical Structure for Learning from Demonstration
Fabrication of HuggieBot 2.0: A More Huggable Robot
Learning Haptic Adjectives from Tactile Data
Feeling With Your Eyes: Visual-Haptic Surface Interaction
S-BAN
General Tactile Sensor Model
Insight: a Haptic Sensor Powered by Vision and Machine Learning
CAPT Motor: A Two-Phase Ironless Motor Structure
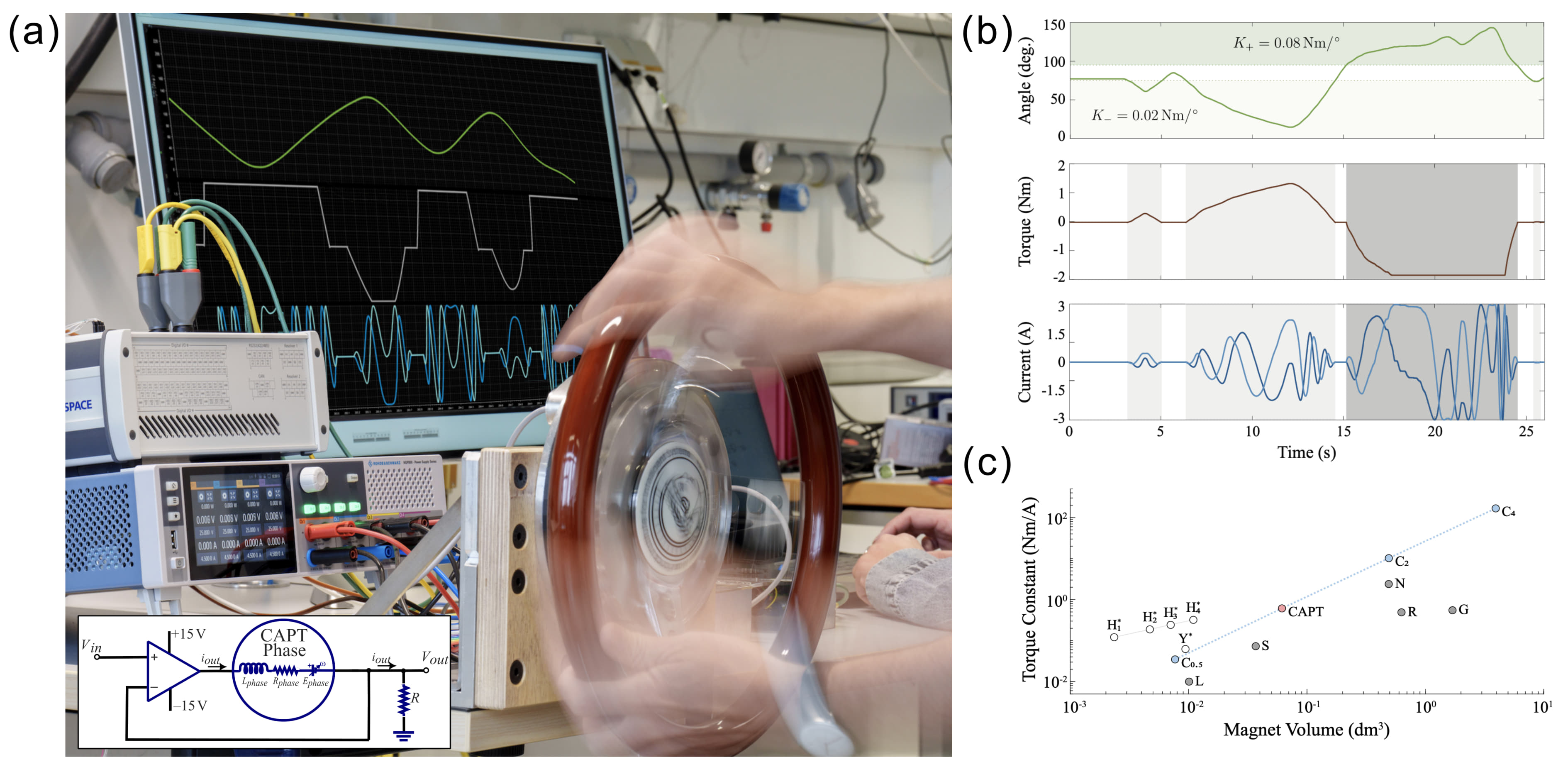
This project concerns the design and evaluation of a new motor structure named CAPT (Continuous And Precise Torque) Motor: the first brushless, ironless, direct-drive motor that introduces a planar two-phase Lorentz-coil array and an axial-flux Halbach-magnet ring.
Unlike existing axial-flux motors, which rely on overlapped three-phase coils wound onto a thick slotted stator, the CAPT Motor's two-phase design allows for non-overlapping coils that can be manufactured separately with optimized thickness, fill factor, and geometrical accuracy, significantly improving performance and manufacturability. We use this innovative structure to build a prototypical CAPT Motor featuring a 60-magnet rotor and a 24-coil stator, with an outer diameter of 206 mm, an inner open diameter of 70 mm, and a thickness of 36 mm. To characterize its performance, we derive an analytical model for its torque output and conduct experimental evaluations, including a demonstration of its working principle and measurement of its torque constant. Lastly, we attached a steering wheel directly to the rotor in order to facilitate haptic interaction, and implemented a variety of closed-loop haptic demonstrations to showcase the CAPT Motor's capabilities.
With a measured torque constant per magnet volume of 9.94 (Nm/A)/dm3, the CAPT Motor outperforms existing ironless motors, establishing it as a promising candidate for applications that require high-torque-density motors capable of operating smoothly near zero speed and at any angular position. Key application areas include force-feedback devices, driving-wheel, and flight-stick simulators.
Members




Publications