Quantifying the Quality of Haptic Interfaces
Shape-Changing Haptic Interfaces
Generating Clear Vibrotactile Cues with Magnets Embedded in a Soft Finger Sheath
Salient Full-Fingertip Haptic Feedback Enabled by Wearable Electrohydraulic Actuation
Cutaneous Electrohydraulic (CUTE) Wearable Devices for Pleasant Broad-Bandwidth Haptic Cues
Modeling Finger-Touchscreen Contact during Electrovibration
Perception of Ultrasonic Friction Pulses
Vibrotactile Playback for Teaching Sensorimotor Skills in Medical Procedures
CAPT Motor: A Two-Phase Ironless Motor Structure
4D Intraoperative Surgical Perception: Anatomical Shape Reconstruction from Multiple Viewpoints
Visual-Inertial Force Estimation in Robotic Surgery
Enhancing Robotic Surgical Training
AiroTouch: Naturalistic Vibrotactile Feedback for Large-Scale Telerobotic Assembly
Optimization-Based Whole-Arm Teleoperation for Natural Human-Robot Interaction
Finger-Surface Contact Mechanics in Diverse Moisture Conditions
Computational Modeling of Finger-Surface Contact
Perceptual Integration of Contact Force Components During Tactile Stimulation
Dynamic Models and Wearable Tactile Devices for the Fingertips
Novel Designs and Rendering Algorithms for Fingertip Haptic Devices
Dimensional Reduction from 3D to 1D for Realistic Vibration Rendering
Prendo: Analyzing Human Grasping Strategies for Visually Occluded Objects
Learning Upper-Limb Exercises from Demonstrations
Minimally Invasive Surgical Training with Multimodal Feedback and Automatic Skill Evaluation
Efficient Large-Area Tactile Sensing for Robot Skin
Haptic Feedback and Autonomous Reflexes for Upper-limb Prostheses
Gait Retraining
Modeling Hand Deformations During Contact
Intraoperative AR Assistance for Robot-Assisted Minimally Invasive Surgery
Immersive VR for Phantom Limb Pain
Visual and Haptic Perception of Real Surfaces
Haptipedia
Gait Propulsion Trainer
TouchTable: A Musical Interface with Haptic Feedback for DJs
Exercise Games with Baxter
Intuitive Social-Physical Robots for Exercise
How Should Robots Hug?
Hierarchical Structure for Learning from Demonstration
Fabrication of HuggieBot 2.0: A More Huggable Robot
Learning Haptic Adjectives from Tactile Data
Feeling With Your Eyes: Visual-Haptic Surface Interaction
S-BAN
General Tactile Sensor Model
Insight: a Haptic Sensor Powered by Vision and Machine Learning
Haptic Feedback and Autonomous Reflexes for Upper-limb Prostheses
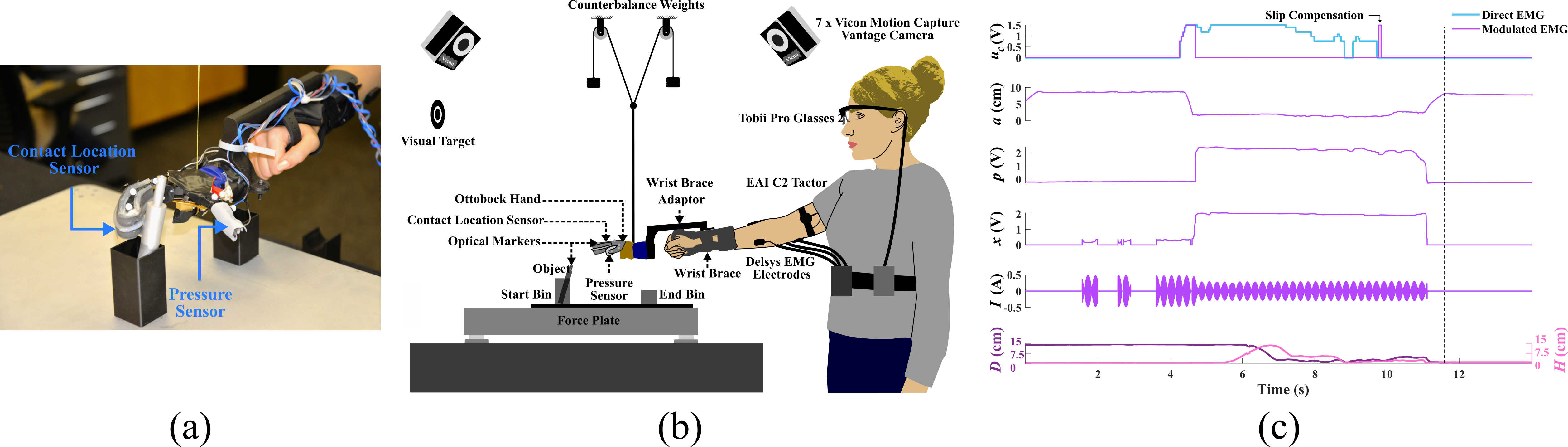
Upper-limb loss prevents amputees from being able to carry out many day-to-day tasks that are necessary for ensuring a good quality of life. Although commercially available prosthetic limbs can replace some of the lost motor function of the healthy limb, the lack of sensory feedback causes amputees to rely heavily on vision to estimate haptic information like contact, slip, and stiffness. This visual crutch prevents object manipulation in a variety of scenarios that healthy individuals take for granted. For example, being able to pick up a pen from a desk while watching a lecture is a task amputees would be unable to do due to a lack of haptic sensation.
For a prosthesis user to pick up an object without direct vision, we hypothesized that they would need to know where on their prosthetic hand they are touching the object, so that they can appropriately adjust the orientation and placement of their hand. We further hypothesized that imbuing a prosthesis with its own reflexes to prevent adverse events like object slip or excessive grasping force can also improve the performance of dexterous tasks. To realize such a system, we built a pressure sensor for use in the autonomous control loop and developed a novel contact-location sensor. This sensor’s signals provide a continuous indication of single-site contact location, which can be fed back to the user in a variety of ways, such as through vibrotactile feedback or distributed pressure feedback.
We investigated the ability of participants to use a myoelectric prosthesis in a reach-to-pick-and-place task without using direct vision. Several combinations of haptic feedback and reflex controllers were tested. Initial results comparing the standard myoelectric prosthesis to a prosthesis with reflex control and vibrotactile feedback show that the combination of tactile feedback and control significantly improve performance consistency [![]() ].
].
Members



Publications