Quantifying the Quality of Haptic Interfaces
Shape-Changing Haptic Interfaces
Generating Clear Vibrotactile Cues with Magnets Embedded in a Soft Finger Sheath
Salient Full-Fingertip Haptic Feedback Enabled by Wearable Electrohydraulic Actuation
Cutaneous Electrohydraulic (CUTE) Wearable Devices for Pleasant Broad-Bandwidth Haptic Cues
Modeling Finger-Touchscreen Contact during Electrovibration
Perception of Ultrasonic Friction Pulses
Vibrotactile Playback for Teaching Sensorimotor Skills in Medical Procedures
CAPT Motor: A Two-Phase Ironless Motor Structure
4D Intraoperative Surgical Perception: Anatomical Shape Reconstruction from Multiple Viewpoints
Visual-Inertial Force Estimation in Robotic Surgery
Enhancing Robotic Surgical Training
AiroTouch: Naturalistic Vibrotactile Feedback for Large-Scale Telerobotic Assembly
Optimization-Based Whole-Arm Teleoperation for Natural Human-Robot Interaction
Finger-Surface Contact Mechanics in Diverse Moisture Conditions
Computational Modeling of Finger-Surface Contact
Perceptual Integration of Contact Force Components During Tactile Stimulation
Dynamic Models and Wearable Tactile Devices for the Fingertips
Novel Designs and Rendering Algorithms for Fingertip Haptic Devices
Dimensional Reduction from 3D to 1D for Realistic Vibration Rendering
Prendo: Analyzing Human Grasping Strategies for Visually Occluded Objects
Learning Upper-Limb Exercises from Demonstrations
Minimally Invasive Surgical Training with Multimodal Feedback and Automatic Skill Evaluation
Efficient Large-Area Tactile Sensing for Robot Skin
Haptic Feedback and Autonomous Reflexes for Upper-limb Prostheses
Gait Retraining
Modeling Hand Deformations During Contact
Intraoperative AR Assistance for Robot-Assisted Minimally Invasive Surgery
Immersive VR for Phantom Limb Pain
Visual and Haptic Perception of Real Surfaces
Haptipedia
Gait Propulsion Trainer
TouchTable: A Musical Interface with Haptic Feedback for DJs
Exercise Games with Baxter
Intuitive Social-Physical Robots for Exercise
How Should Robots Hug?
Hierarchical Structure for Learning from Demonstration
Fabrication of HuggieBot 2.0: A More Huggable Robot
Learning Haptic Adjectives from Tactile Data
Feeling With Your Eyes: Visual-Haptic Surface Interaction
S-BAN
General Tactile Sensor Model
Insight: a Haptic Sensor Powered by Vision and Machine Learning
Visual-Inertial Force Estimation in Robotic Surgery
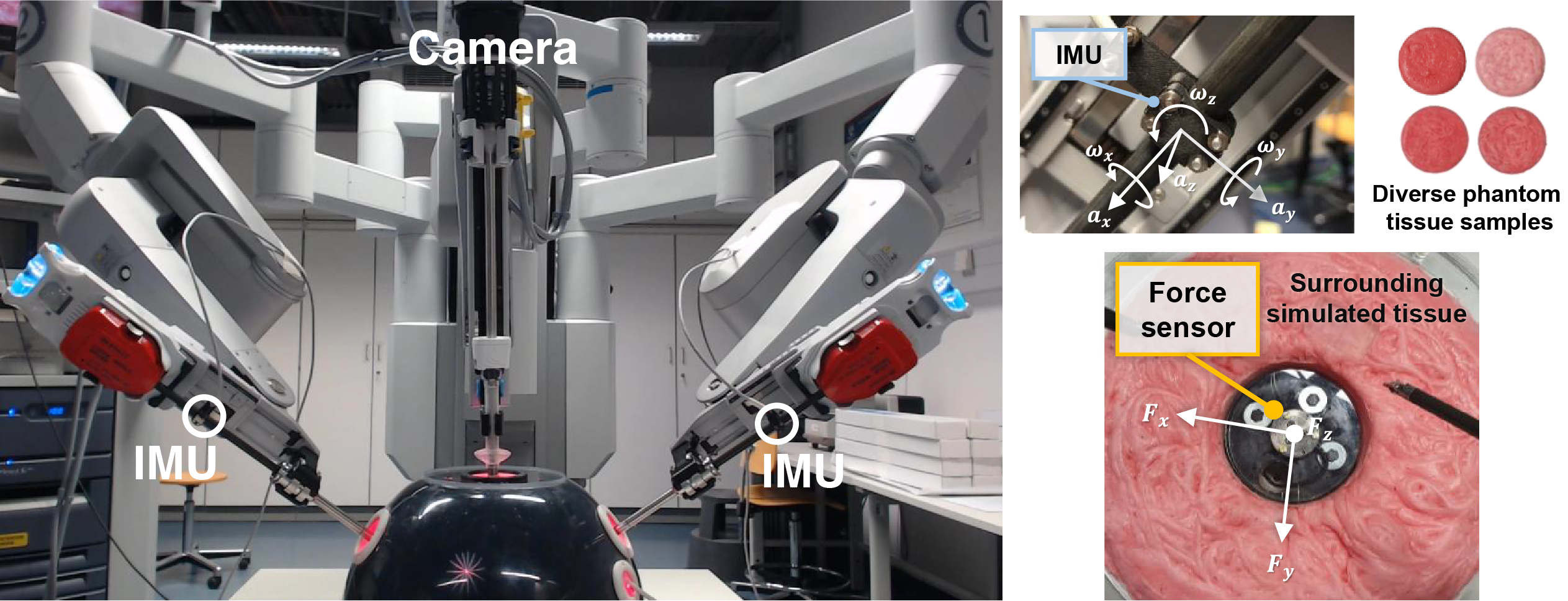
Force feedback is a crucial aspect of surgical procedures. Surgeons rely on their sense of touch to locate tumors, identify blood vessels, and safely manipulate tissue. However, in robot-assisted minimally invasive surgery, surgeons cannot directly feel the forces they apply to tissue through the robotic instruments. This lack of haptic feedback can lead to excessive force application, potentially causing tissue damage, or insufficient force, which can result in inefficient procedures. While direct force sensing could help, integrating sensors into surgical instruments requires addressing significant challenges of biocompatibility, sterilization, miniaturization, and robustness.
To overcome these limitations, we propose an indirect force-sensing method that combines monocular endoscopic video with inertial measurements units (IMUs) mounted on the instrument shafts. Our research objective is to demonstrate that visual tissue deformation cues combined with inertial information of the instruments can effectively estimate interaction forces during robotic surgery [![]() ]. We developed this approach using a da Vinci Si robot, but designed it to be compatible with various robotic surgery platforms and traditional laparoscopic surgery.
]. We developed this approach using a da Vinci Si robot, but designed it to be compatible with various robotic surgery platforms and traditional laparoscopic surgery.
We established a comprehensive experimental setup using four phantom tissue samples of varying stiffness and a force sensor for ground-truth data. The sensing system combines visual information acquired through the endoscope's left channel with inertial measurements from the IMUs mounted externally on the instrument shafts. We then collected 230 one-minute recordings from four operators performing palpation tasks perpendicularly to the tissue.
Based on extensive testing of different architectures, we developed a deep learning pipeline that uses DenseNet for visual processing combined with temporal modeling through (Bi)LSTM networks. Our system demonstrates strong performance in estimating normal forces in the palpations tasks, particularly on tissues of higher stiffness, while also showing the capability to estimate smaller shear forces. This indirect sensing approach has thus the potential to offer a practical solution for force estimation in robotic surgery while avoiding the complications of direct sensing methods.
Members




Publications