Quantifying the Quality of Haptic Interfaces
Shape-Changing Haptic Interfaces
Generating Clear Vibrotactile Cues with Magnets Embedded in a Soft Finger Sheath
Salient Full-Fingertip Haptic Feedback Enabled by Wearable Electrohydraulic Actuation
Cutaneous Electrohydraulic (CUTE) Wearable Devices for Pleasant Broad-Bandwidth Haptic Cues
Modeling Finger-Touchscreen Contact during Electrovibration
Perception of Ultrasonic Friction Pulses
Vibrotactile Playback for Teaching Sensorimotor Skills in Medical Procedures
CAPT Motor: A Two-Phase Ironless Motor Structure
4D Intraoperative Surgical Perception: Anatomical Shape Reconstruction from Multiple Viewpoints
Visual-Inertial Force Estimation in Robotic Surgery
Enhancing Robotic Surgical Training
AiroTouch: Naturalistic Vibrotactile Feedback for Large-Scale Telerobotic Assembly
Optimization-Based Whole-Arm Teleoperation for Natural Human-Robot Interaction
Finger-Surface Contact Mechanics in Diverse Moisture Conditions
Computational Modeling of Finger-Surface Contact
Perceptual Integration of Contact Force Components During Tactile Stimulation
Dynamic Models and Wearable Tactile Devices for the Fingertips
Novel Designs and Rendering Algorithms for Fingertip Haptic Devices
Dimensional Reduction from 3D to 1D for Realistic Vibration Rendering
Prendo: Analyzing Human Grasping Strategies for Visually Occluded Objects
Learning Upper-Limb Exercises from Demonstrations
Minimally Invasive Surgical Training with Multimodal Feedback and Automatic Skill Evaluation
Efficient Large-Area Tactile Sensing for Robot Skin
Haptic Feedback and Autonomous Reflexes for Upper-limb Prostheses
Gait Retraining
Modeling Hand Deformations During Contact
Intraoperative AR Assistance for Robot-Assisted Minimally Invasive Surgery
Immersive VR for Phantom Limb Pain
Visual and Haptic Perception of Real Surfaces
Haptipedia
Gait Propulsion Trainer
TouchTable: A Musical Interface with Haptic Feedback for DJs
Exercise Games with Baxter
Intuitive Social-Physical Robots for Exercise
How Should Robots Hug?
Hierarchical Structure for Learning from Demonstration
Fabrication of HuggieBot 2.0: A More Huggable Robot
Learning Haptic Adjectives from Tactile Data
Feeling With Your Eyes: Visual-Haptic Surface Interaction
S-BAN
General Tactile Sensor Model
Insight: a Haptic Sensor Powered by Vision and Machine Learning
4D Intraoperative Surgical Perception: Anatomical Shape Reconstruction from Multiple Viewpoints
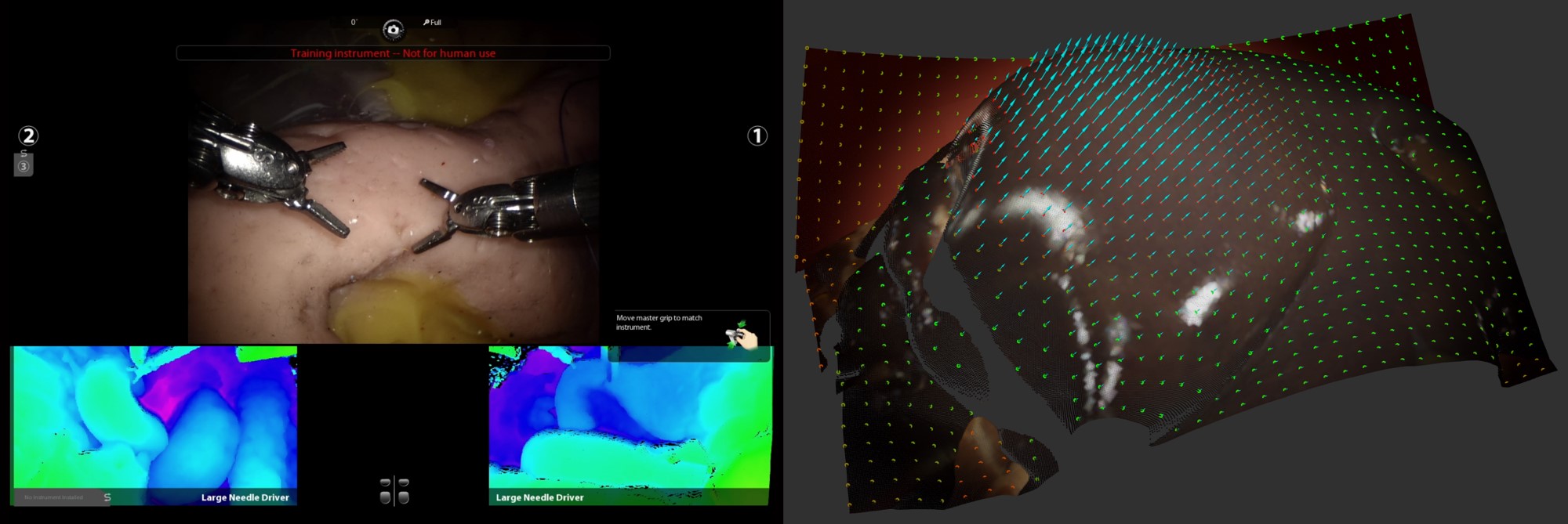
New sensing technologies and advanced processing algorithms are transforming computer-integrated surgery. While researchers are actively investigating neural perception and learned representations for vision-based surgical assistance, the majority of these methods build geometric estimates based on 2D white-light images. While being the clinical standard for decades, this type of imaging will evolve through miniaturization of hyperspectral and depth sensors. Furthermore, visual inspection in minimally invasive surgery is usually done with a single camera, preventing the availability of multi-viewpoint imaging data. To promote the generation of real-time, accurate, and robust spatiotemporal measurements of the intraoperative anatomy, this project expands in three main directions: i) investigation and prototyping of innovative 3D sensing technologies for surgery, ii) development of multi-viewpoint computational methods for kinematic fusion and scene reconstruction, iii) acquisition of highly realistic datasets with multiple visual and geometric measurement devices.
We advocate the introduction of one or more lidar (3D laser-based direct time-of-flight) in the abdominal cavity as additional imaging sensors [![]() ]. To characterize the quality with which this technology could perform anatomical surface measurements during surgery, we conducted ex-vivo experiments comparing lidar to traditional learning-based stereo matching from endoscopic images. Our findings highlight the potential and limitations of lidar for surgical 3D perception and point toward new intraoperative methods that could complement time-of-flight with spectral imaging [
]. To characterize the quality with which this technology could perform anatomical surface measurements during surgery, we conducted ex-vivo experiments comparing lidar to traditional learning-based stereo matching from endoscopic images. Our findings highlight the potential and limitations of lidar for surgical 3D perception and point toward new intraoperative methods that could complement time-of-flight with spectral imaging [![]() ][https://arxiv.org/abs/2401.10709].
][https://arxiv.org/abs/2401.10709].
We believe future computer-integrated surgery will benefit from an abundance of intra corporeal measurement sources and efficient processing of their outputs, with the dual goals of supporting surgeons and laying the foundation for surgical autonomy. To jointly achieve these goals, special attention should be given to intuitive user interfaces and effective visualization strategies [![]() ], as well as to building computational systems able to generate accurate quantitative estimates. We are currently developing algorithmic solutions to deploy multi-viewpoint systems in minimally invasive surgery [https://arxiv.org/abs/2408.04367].
], as well as to building computational systems able to generate accurate quantitative estimates. We are currently developing algorithmic solutions to deploy multi-viewpoint systems in minimally invasive surgery [https://arxiv.org/abs/2408.04367].
Conducting research in fields like robotics and computer science applied to surgery - which is a strictly regulated, high-volume, and high-risk practice - comes with the challenge of developing technologies that can (and should) directly impact human life. In the era of learning systems, clinical translation of biomedical research, especially in the algorithmic space, is strongly dependent on the quality and availability of data for development and lab testing. To contribute in this direction, we are actively building hardware and software infrastructure for the collection of high-fidelity multi-sensor imaging datasets that will boost surgical research and deliver a significant impact to society.
This research project involves collaborations with Cesar Cadena (ETH Zürich), Marco Hutter (ETH Zürich), Sergey Prokudin (ETH Zürich), and Siyu Tang (ETH Zürich).
Members






Publications