Quantifying the Quality of Haptic Interfaces
Shape-Changing Haptic Interfaces
Generating Clear Vibrotactile Cues with Magnets Embedded in a Soft Finger Sheath
Salient Full-Fingertip Haptic Feedback Enabled by Wearable Electrohydraulic Actuation
Cutaneous Electrohydraulic (CUTE) Wearable Devices for Pleasant Broad-Bandwidth Haptic Cues
Modeling Finger-Touchscreen Contact during Electrovibration
Perception of Ultrasonic Friction Pulses
Vibrotactile Playback for Teaching Sensorimotor Skills in Medical Procedures
CAPT Motor: A Two-Phase Ironless Motor Structure
4D Intraoperative Surgical Perception: Anatomical Shape Reconstruction from Multiple Viewpoints
Visual-Inertial Force Estimation in Robotic Surgery
Enhancing Robotic Surgical Training
AiroTouch: Naturalistic Vibrotactile Feedback for Large-Scale Telerobotic Assembly
Optimization-Based Whole-Arm Teleoperation for Natural Human-Robot Interaction
Finger-Surface Contact Mechanics in Diverse Moisture Conditions
Computational Modeling of Finger-Surface Contact
Perceptual Integration of Contact Force Components During Tactile Stimulation
Dynamic Models and Wearable Tactile Devices for the Fingertips
Novel Designs and Rendering Algorithms for Fingertip Haptic Devices
Dimensional Reduction from 3D to 1D for Realistic Vibration Rendering
Prendo: Analyzing Human Grasping Strategies for Visually Occluded Objects
Learning Upper-Limb Exercises from Demonstrations
Minimally Invasive Surgical Training with Multimodal Feedback and Automatic Skill Evaluation
Efficient Large-Area Tactile Sensing for Robot Skin
Haptic Feedback and Autonomous Reflexes for Upper-limb Prostheses
Gait Retraining
Modeling Hand Deformations During Contact
Intraoperative AR Assistance for Robot-Assisted Minimally Invasive Surgery
Immersive VR for Phantom Limb Pain
Visual and Haptic Perception of Real Surfaces
Haptipedia
Gait Propulsion Trainer
TouchTable: A Musical Interface with Haptic Feedback for DJs
Exercise Games with Baxter
Intuitive Social-Physical Robots for Exercise
How Should Robots Hug?
Hierarchical Structure for Learning from Demonstration
Fabrication of HuggieBot 2.0: A More Huggable Robot
Learning Haptic Adjectives from Tactile Data
Feeling With Your Eyes: Visual-Haptic Surface Interaction
S-BAN
General Tactile Sensor Model
Insight: a Haptic Sensor Powered by Vision and Machine Learning
Perceptual Integration of Contact Force Components During Tactile Stimulation
The contact forces we experience when our body interacts with objects provide essential sensory cues that help us understand the world and adapt our behavior. Sliding contact in particular arises in most daily activities, for example, when we feel the smoothness of fabric before buying clothing or when we slide our finger against the screen of a smartphone to move between pictures.
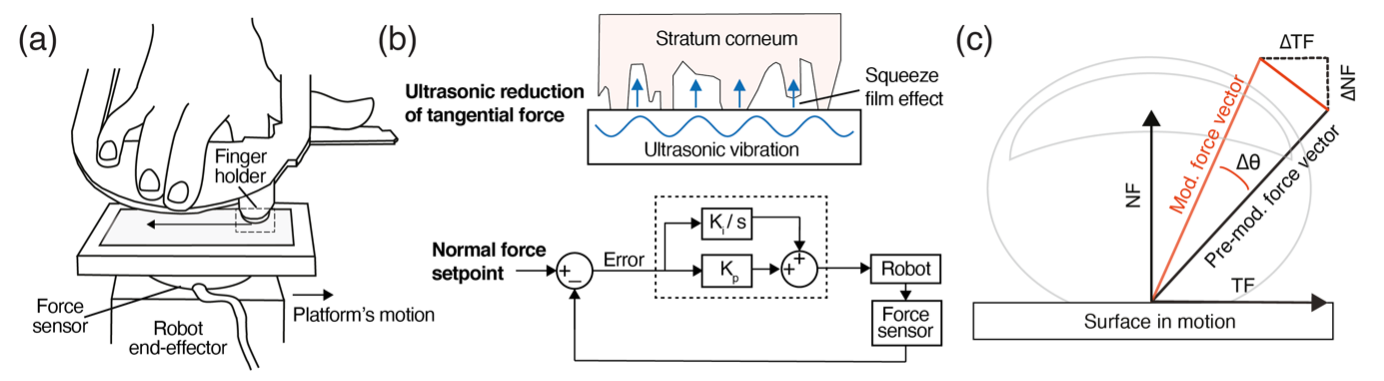
Humans are very sensitive to frictional changes while sliding the fingertip across a flat surface. Despite these observations, it is unclear how the three-dimensional mechanical deformations induced by haptic exploration are processed by different skin receptors and the brain. This collaborative project with UCLouvain aims to quantify the respective contributions of the normal force and the tangential force to the human perception of tactile stimulation. We induce variations of the normal force with a force-controlled robotic platform during passive stimulation of the finger while simultaneously modulating the tangential force with an ultrasonic haptic display that can reduce the finger-surface friction. By coupling these two technologies, we can generate independent variations of the normal and tangential force components that do not occur during natural interactions [![]() ].
].
The first result of these experiments showed that humans detect changes in the normal force without interference from the concomitant tangential force variations [![]() ]; however, we also found a higher sensory threshold than is usually observed for force perception. A second study showed that humans most probably rely on the amplitude of the three-dimensional force vector to perceive changes in the contact force on their skin, rather than previously hypothesized metrics like the coefficient of friction. These studies elucidated which parameters are the most efficient at conveying force cues to the human brain, a result that can both explain and benefit the design of haptic interfaces.
]; however, we also found a higher sensory threshold than is usually observed for force perception. A second study showed that humans most probably rely on the amplitude of the three-dimensional force vector to perceive changes in the contact force on their skin, rather than previously hypothesized metrics like the coefficient of friction. These studies elucidated which parameters are the most efficient at conveying force cues to the human brain, a result that can both explain and benefit the design of haptic interfaces.
Members


Publications