Quantifying the Quality of Haptic Interfaces
Shape-Changing Haptic Interfaces
Generating Clear Vibrotactile Cues with Magnets Embedded in a Soft Finger Sheath
Salient Full-Fingertip Haptic Feedback Enabled by Wearable Electrohydraulic Actuation
Cutaneous Electrohydraulic (CUTE) Wearable Devices for Pleasant Broad-Bandwidth Haptic Cues
Modeling Finger-Touchscreen Contact during Electrovibration
Perception of Ultrasonic Friction Pulses
Vibrotactile Playback for Teaching Sensorimotor Skills in Medical Procedures
CAPT Motor: A Two-Phase Ironless Motor Structure
4D Intraoperative Surgical Perception: Anatomical Shape Reconstruction from Multiple Viewpoints
Visual-Inertial Force Estimation in Robotic Surgery
Enhancing Robotic Surgical Training
AiroTouch: Naturalistic Vibrotactile Feedback for Large-Scale Telerobotic Assembly
Optimization-Based Whole-Arm Teleoperation for Natural Human-Robot Interaction
Finger-Surface Contact Mechanics in Diverse Moisture Conditions
Computational Modeling of Finger-Surface Contact
Perceptual Integration of Contact Force Components During Tactile Stimulation
Dynamic Models and Wearable Tactile Devices for the Fingertips
Novel Designs and Rendering Algorithms for Fingertip Haptic Devices
Dimensional Reduction from 3D to 1D for Realistic Vibration Rendering
Prendo: Analyzing Human Grasping Strategies for Visually Occluded Objects
Learning Upper-Limb Exercises from Demonstrations
Minimally Invasive Surgical Training with Multimodal Feedback and Automatic Skill Evaluation
Efficient Large-Area Tactile Sensing for Robot Skin
Haptic Feedback and Autonomous Reflexes for Upper-limb Prostheses
Gait Retraining
Modeling Hand Deformations During Contact
Intraoperative AR Assistance for Robot-Assisted Minimally Invasive Surgery
Immersive VR for Phantom Limb Pain
Visual and Haptic Perception of Real Surfaces
Haptipedia
Gait Propulsion Trainer
TouchTable: A Musical Interface with Haptic Feedback for DJs
Exercise Games with Baxter
Intuitive Social-Physical Robots for Exercise
How Should Robots Hug?
Hierarchical Structure for Learning from Demonstration
Fabrication of HuggieBot 2.0: A More Huggable Robot
Learning Haptic Adjectives from Tactile Data
Feeling With Your Eyes: Visual-Haptic Surface Interaction
S-BAN
General Tactile Sensor Model
Insight: a Haptic Sensor Powered by Vision and Machine Learning
Gait Propulsion Trainer
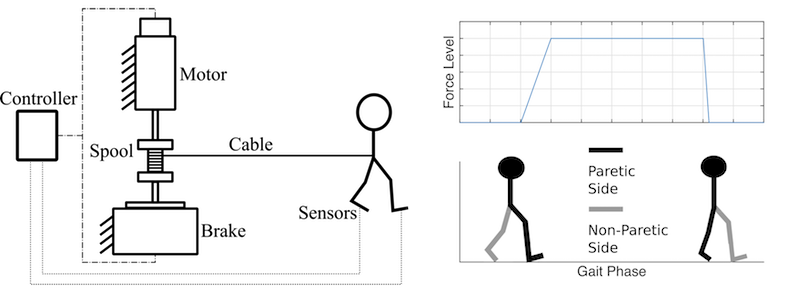
Walking speed and symmetry are high priorities for people with hemiparesis from stroke. We developed the Gait Propulsion Trainer (GPT) to help such individuals improve their walking abilities by increasing the propulsive force generated by the paretic leg. The GPT centers on a cable spool attached to a stand at waist level. The end of the cable attaches to the center back of a waist harness worn by the user. As the person walks away from the spool, a rotary brake on the spool's shaft resists its rotation between paretic mid-stance (non-paretic toe off) and paretic swing onset (paretic toe off). This periodic resistance was designed to make the participant push off harder than usual on the paretic side when advancing forward. A motor helps cancel the brake's friction when the resistance is not active and also reels in the cable between trials [![]() ].
].
After building and characterizing the device, we conducted a preliminary study at SUNY Stony Brook University, USA, with a 24-year-old female with left-side hemiparesis and gait asymmetry following pediatric traumatic brain injury [![]() ]. We found that GPT resistance increased paretic leg propulsive forces generated in late stance by 25% over baseline values. Importantly, increased paretic propulsion persisted when GPT resistance was removed in post-braking trials, even though the participant walked with the GPT for a short training period (only ten 10 m trials).
]. We found that GPT resistance increased paretic leg propulsive forces generated in late stance by 25% over baseline values. Importantly, increased paretic propulsion persisted when GPT resistance was removed in post-braking trials, even though the participant walked with the GPT for a short training period (only ten 10 m trials).
This project was funded by the US National Institutes of Health (NIH) via grant #R03HD092822; Erin Vasudevan and Katherine J. Kuchenbecker were this grant's co-principal investigators.
Members

Publications