Quantifying the Quality of Haptic Interfaces
Shape-Changing Haptic Interfaces
Generating Clear Vibrotactile Cues with Magnets Embedded in a Soft Finger Sheath
Salient Full-Fingertip Haptic Feedback Enabled by Wearable Electrohydraulic Actuation
Cutaneous Electrohydraulic (CUTE) Wearable Devices for Pleasant Broad-Bandwidth Haptic Cues
Modeling Finger-Touchscreen Contact during Electrovibration
Perception of Ultrasonic Friction Pulses
Vibrotactile Playback for Teaching Sensorimotor Skills in Medical Procedures
CAPT Motor: A Two-Phase Ironless Motor Structure
4D Intraoperative Surgical Perception: Anatomical Shape Reconstruction from Multiple Viewpoints
Visual-Inertial Force Estimation in Robotic Surgery
Enhancing Robotic Surgical Training
AiroTouch: Naturalistic Vibrotactile Feedback for Large-Scale Telerobotic Assembly
Optimization-Based Whole-Arm Teleoperation for Natural Human-Robot Interaction
Finger-Surface Contact Mechanics in Diverse Moisture Conditions
Computational Modeling of Finger-Surface Contact
Perceptual Integration of Contact Force Components During Tactile Stimulation
Dynamic Models and Wearable Tactile Devices for the Fingertips
Novel Designs and Rendering Algorithms for Fingertip Haptic Devices
Dimensional Reduction from 3D to 1D for Realistic Vibration Rendering
Prendo: Analyzing Human Grasping Strategies for Visually Occluded Objects
Learning Upper-Limb Exercises from Demonstrations
Minimally Invasive Surgical Training with Multimodal Feedback and Automatic Skill Evaluation
Efficient Large-Area Tactile Sensing for Robot Skin
Haptic Feedback and Autonomous Reflexes for Upper-limb Prostheses
Gait Retraining
Modeling Hand Deformations During Contact
Intraoperative AR Assistance for Robot-Assisted Minimally Invasive Surgery
Immersive VR for Phantom Limb Pain
Visual and Haptic Perception of Real Surfaces
Haptipedia
Gait Propulsion Trainer
TouchTable: A Musical Interface with Haptic Feedback for DJs
Exercise Games with Baxter
Intuitive Social-Physical Robots for Exercise
How Should Robots Hug?
Hierarchical Structure for Learning from Demonstration
Fabrication of HuggieBot 2.0: A More Huggable Robot
Learning Haptic Adjectives from Tactile Data
Feeling With Your Eyes: Visual-Haptic Surface Interaction
S-BAN
General Tactile Sensor Model
Insight: a Haptic Sensor Powered by Vision and Machine Learning
Fabrication of HuggieBot 2.0: A More Huggable Robot
Our first HuggieBot research project showed that people are generally accepting of soft, warm robot hugs that squeeze the user and release promptly. In the future we would like to see if robot hugs can provide the same known health benefits as human hugs. Testing this hypothesis requires a new version of HuggieBot that allows more control over hugs than our original robot test platform; thus, we are therefore now designing, building, and programming HuggieBot 2.0.
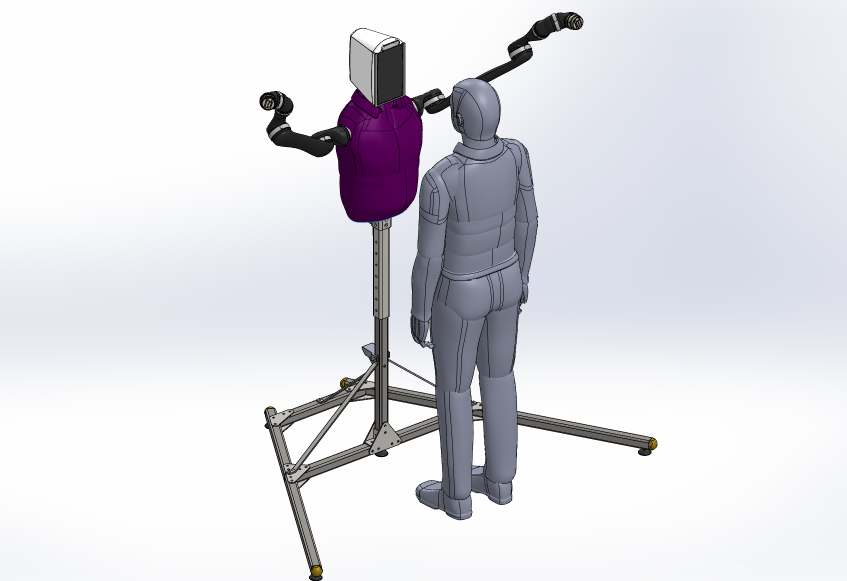
The HuggieBot 2.0 custom robot design builds off positive and negative critiques of the Willow Garage Personal Robot 2 (PR2), which was used in our previous experiment [![]() ]. As shown in the figure above, a v-shaped stand will allow participants to get closer to the robot without having to lean over a large base, which was a pain point with the PR2.
]. As shown in the figure above, a v-shaped stand will allow participants to get closer to the robot without having to lean over a large base, which was a pain point with the PR2.
This new platform uses two Kinova JACO 6-DOF arms, which are slimmer, quieter, and smoother than the arms of the PR2. To accommodate various hugging arm placements and to streamline the hugging process, we are currently creating an inflatable chest that includes haptic sensors; the chest will additionally be soft and heated because users responded favorably to these two features during the previous study. A final element of HuggieBot 2.0 is a face screen that can show both animated faces or pre-recorded video messages to make the hug experience more personal, more enjoyable, and less mechanical for the user.
To test if HuggieBot 2.0 can provide similar health benefits to people as human hugs, we plan to carefully induce mental stress on study participants and then offer either a human hug, an active robot hug, a passive robot hug, or self-soothing. We will use objective measures such as heart rate, facial expression, and cortisol and oxytocin levels to evaluate users' physical responses to the different hugs.
Members



Publications