Quantifying the Quality of Haptic Interfaces
Shape-Changing Haptic Interfaces
Generating Clear Vibrotactile Cues with Magnets Embedded in a Soft Finger Sheath
Salient Full-Fingertip Haptic Feedback Enabled by Wearable Electrohydraulic Actuation
Cutaneous Electrohydraulic (CUTE) Wearable Devices for Pleasant Broad-Bandwidth Haptic Cues
Modeling Finger-Touchscreen Contact during Electrovibration
Perception of Ultrasonic Friction Pulses
Vibrotactile Playback for Teaching Sensorimotor Skills in Medical Procedures
CAPT Motor: A Two-Phase Ironless Motor Structure
4D Intraoperative Surgical Perception: Anatomical Shape Reconstruction from Multiple Viewpoints
Visual-Inertial Force Estimation in Robotic Surgery
Enhancing Robotic Surgical Training
AiroTouch: Naturalistic Vibrotactile Feedback for Large-Scale Telerobotic Assembly
Optimization-Based Whole-Arm Teleoperation for Natural Human-Robot Interaction
Finger-Surface Contact Mechanics in Diverse Moisture Conditions
Computational Modeling of Finger-Surface Contact
Perceptual Integration of Contact Force Components During Tactile Stimulation
Dynamic Models and Wearable Tactile Devices for the Fingertips
Novel Designs and Rendering Algorithms for Fingertip Haptic Devices
Dimensional Reduction from 3D to 1D for Realistic Vibration Rendering
Prendo: Analyzing Human Grasping Strategies for Visually Occluded Objects
Learning Upper-Limb Exercises from Demonstrations
Minimally Invasive Surgical Training with Multimodal Feedback and Automatic Skill Evaluation
Efficient Large-Area Tactile Sensing for Robot Skin
Haptic Feedback and Autonomous Reflexes for Upper-limb Prostheses
Gait Retraining
Modeling Hand Deformations During Contact
Intraoperative AR Assistance for Robot-Assisted Minimally Invasive Surgery
Immersive VR for Phantom Limb Pain
Visual and Haptic Perception of Real Surfaces
Haptipedia
Gait Propulsion Trainer
TouchTable: A Musical Interface with Haptic Feedback for DJs
Exercise Games with Baxter
Intuitive Social-Physical Robots for Exercise
How Should Robots Hug?
Hierarchical Structure for Learning from Demonstration
Fabrication of HuggieBot 2.0: A More Huggable Robot
Learning Haptic Adjectives from Tactile Data
Feeling With Your Eyes: Visual-Haptic Surface Interaction
S-BAN
General Tactile Sensor Model
Insight: a Haptic Sensor Powered by Vision and Machine Learning
Modeling Finger-Touchscreen Contact during Electrovibration
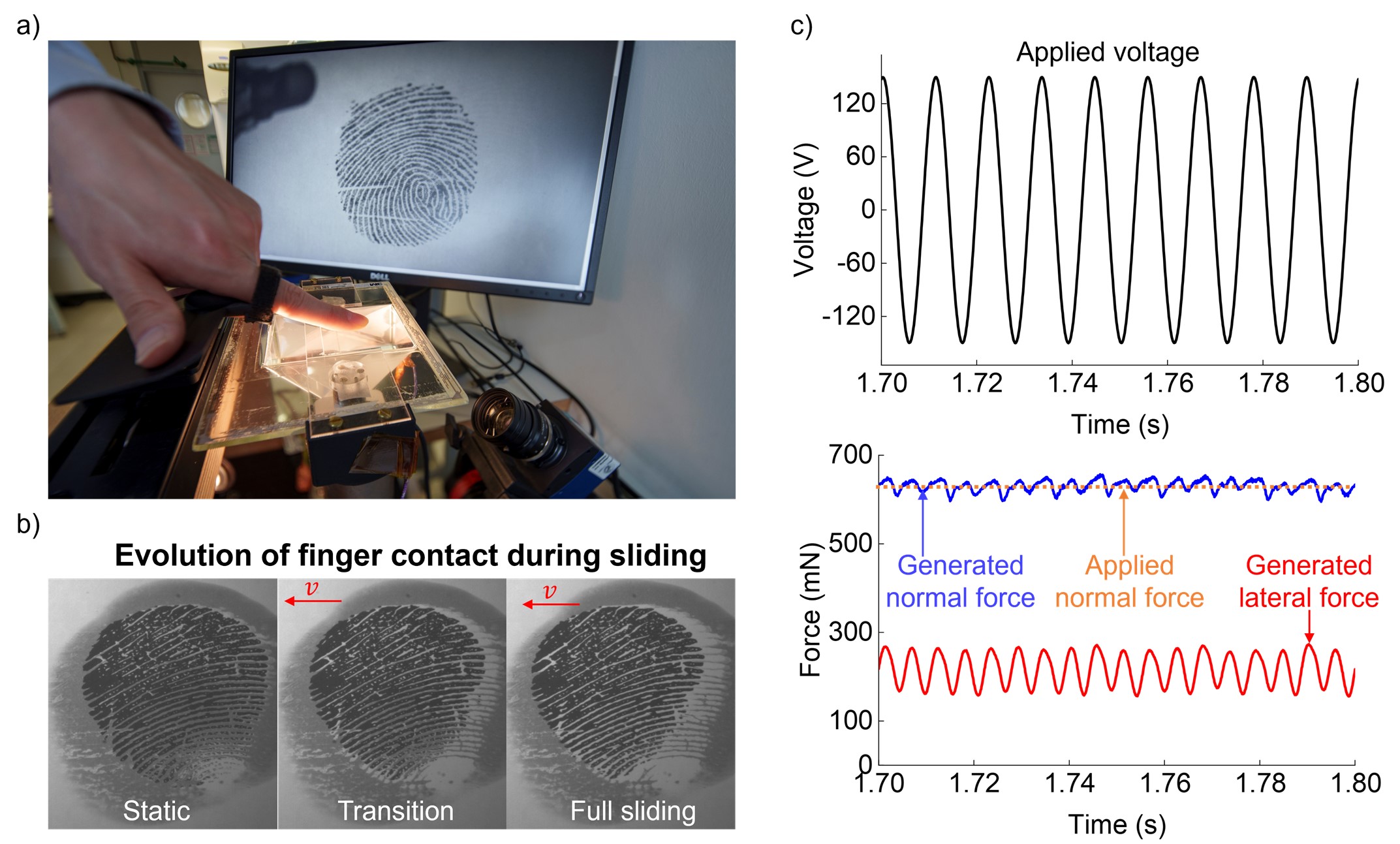
Touchscreens, commonly used in mobile phones and liquid-crystal displays, are a primary interface for digital interaction. By integrating a transparent conductive layer beneath the surface and applying an AC voltage, electrostatic actuation occurs upon contact with a human finger. This haptic rendering technique, known as electrovibration, has attracted considerable scientific interest due to its ability to simulate textures and friction and enhance haptic feedback for touchscreens and virtual reality. While extensive research has focused on human subject studies and the macroscale interpretation of experimental results, the fundamental physical mechanisms underlying these phenomena remain largely unexplored.
This project investigates how finger motion (stationary or moving at different speeds), finger pressing force, and the applied voltage waveform affect the perception of electrovibration and the physical mechanisms that govern this type of haptic feedback.
In our first study [![]()
![]()
![]()
![]() ], by conducting psychophysical experiments and simultaneously measuring contact forces, we demonstrated that finger's motion significantly affect what the user feels. At a given voltage, a single moving finger experiences a much larger fluctuation in electrovibration forces than a single stationary finger, making electrovibration much easier to feel during interactions involving finger movement. Indeed, only about 30% of participants could detect the stimulus without motion. Part of this difference comes from the fact that relative motion greatly increases the electrical impedance between a finger and the screen. In contrast to some theories, we found that threshold-level electrovibration did not significantly affect the coefficient of kinetic friction in any conditions.
], by conducting psychophysical experiments and simultaneously measuring contact forces, we demonstrated that finger's motion significantly affect what the user feels. At a given voltage, a single moving finger experiences a much larger fluctuation in electrovibration forces than a single stationary finger, making electrovibration much easier to feel during interactions involving finger movement. Indeed, only about 30% of participants could detect the stimulus without motion. Part of this difference comes from the fact that relative motion greatly increases the electrical impedance between a finger and the screen. In contrast to some theories, we found that threshold-level electrovibration did not significantly affect the coefficient of kinetic friction in any conditions.
Currently, we are investigating the effects of finger contact, finger motion, and environmental factors on perceived sensations using optical, electrical, and mechanical approaches. Additionally, we are developing a multiphysics model to predict friction forces during finger-touchscreen interactions at the nanoscale.
This research project involves a collaboration with Yuan Ma (The Hong Kong Polytechnic University).
Members



Publications