Quantifying the Quality of Haptic Interfaces
Shape-Changing Haptic Interfaces
Generating Clear Vibrotactile Cues with Magnets Embedded in a Soft Finger Sheath
Salient Full-Fingertip Haptic Feedback Enabled by Wearable Electrohydraulic Actuation
Cutaneous Electrohydraulic (CUTE) Wearable Devices for Pleasant Broad-Bandwidth Haptic Cues
Modeling Finger-Touchscreen Contact during Electrovibration
Perception of Ultrasonic Friction Pulses
Vibrotactile Playback for Teaching Sensorimotor Skills in Medical Procedures
CAPT Motor: A Two-Phase Ironless Motor Structure
4D Intraoperative Surgical Perception: Anatomical Shape Reconstruction from Multiple Viewpoints
Visual-Inertial Force Estimation in Robotic Surgery
Enhancing Robotic Surgical Training
AiroTouch: Naturalistic Vibrotactile Feedback for Large-Scale Telerobotic Assembly
Optimization-Based Whole-Arm Teleoperation for Natural Human-Robot Interaction
Finger-Surface Contact Mechanics in Diverse Moisture Conditions
Computational Modeling of Finger-Surface Contact
Perceptual Integration of Contact Force Components During Tactile Stimulation
Dynamic Models and Wearable Tactile Devices for the Fingertips
Novel Designs and Rendering Algorithms for Fingertip Haptic Devices
Dimensional Reduction from 3D to 1D for Realistic Vibration Rendering
Prendo: Analyzing Human Grasping Strategies for Visually Occluded Objects
Learning Upper-Limb Exercises from Demonstrations
Minimally Invasive Surgical Training with Multimodal Feedback and Automatic Skill Evaluation
Efficient Large-Area Tactile Sensing for Robot Skin
Haptic Feedback and Autonomous Reflexes for Upper-limb Prostheses
Gait Retraining
Modeling Hand Deformations During Contact
Intraoperative AR Assistance for Robot-Assisted Minimally Invasive Surgery
Immersive VR for Phantom Limb Pain
Visual and Haptic Perception of Real Surfaces
Haptipedia
Gait Propulsion Trainer
TouchTable: A Musical Interface with Haptic Feedback for DJs
Exercise Games with Baxter
Intuitive Social-Physical Robots for Exercise
How Should Robots Hug?
Hierarchical Structure for Learning from Demonstration
Fabrication of HuggieBot 2.0: A More Huggable Robot
Learning Haptic Adjectives from Tactile Data
Feeling With Your Eyes: Visual-Haptic Surface Interaction
S-BAN
General Tactile Sensor Model
Insight: a Haptic Sensor Powered by Vision and Machine Learning
Finger-Surface Contact Mechanics in Diverse Moisture Conditions
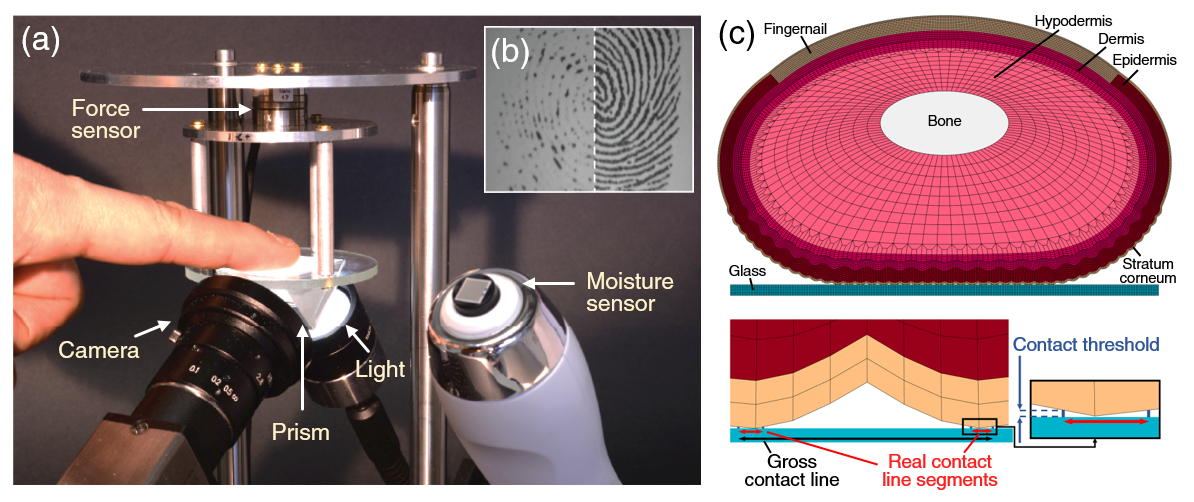
The finger's instantaneous contact state with a surface is strongly affected by its peripheral environment. Fluid on the contact surface and the secretion of sweat from the fingerpad's glands cause particularly profound effects because the outer layer of skin easily absorbs moisture. To elucidate fundamental aspects of tactile interaction, we study how moisture affects the finger's material properties, the contact area, the creation of friction, and perception.
First, we have built a series of apparatuses to measure three-dimensional finger contact forces, contact images, and fingerpad moisture [![]()
![]()
![]() ]. The camera captures clear fingerprint images by means of a reflection-based optical design that contrasts between contact and non-contact areas. We are presently developing a transparent real-time moisture sensor to include in future setups.
]. The camera captures clear fingerprint images by means of a reflection-based optical design that contrasts between contact and non-contact areas. We are presently developing a transparent real-time moisture sensor to include in future setups.
We used one setup to investigate the influence of different wetting conditions on the initial contact evolution. The area measurements showed that the chosen fluid can drastically alter the real contact area (where the fingerprints touch the glass); however, gross contact area (the entire oval-shaped area over which contact occurs) was only slightly affected. To explore the causes of this phenomenon, we investigated the combined effects of tissue elasticity, skin-surface friction, and fingerprint ridges on contact area using a detailed finite element model. The simulations revealed the dominant influence of the elastic modulus over friction and an unusual contact phenomenon.
We used another apparatus and a three-dimensional finite element model to study how sweating affects the development of gross contact area [![]()
![]() ]. Four key material properties of our model were optimized to fit the measurements obtained from a participant repeatedly pressing on a glass plate in dry, natural, and moist finger conditions. The results showed that the softness of the bulk tissue reduces as the finger becomes more hydrated, and the epidermis of the moist finger is softest.
]. Four key material properties of our model were optimized to fit the measurements obtained from a participant repeatedly pressing on a glass plate in dry, natural, and moist finger conditions. The results showed that the softness of the bulk tissue reduces as the finger becomes more hydrated, and the epidermis of the moist finger is softest.
Finally, we investigated how contact mechanics relate to perception by studying why people sometimes perceive a sensation of stickiness when pulling their finger away from a surface [![]()
![]() ]. We asked nine participants to actively press their finger on the glass plate of our apparatus. Our analyses showed that finger-surface adhesion builds with pressing time, causing a larger normal impulse during detachment and thus a more intense stickiness sensation.
]. We asked nine participants to actively press their finger on the glass plate of our apparatus. Our analyses showed that finger-surface adhesion builds with pressing time, causing a larger normal impulse during detachment and thus a more intense stickiness sensation.
Members




Publications