Quantifying the Quality of Haptic Interfaces
Shape-Changing Haptic Interfaces
Generating Clear Vibrotactile Cues with Magnets Embedded in a Soft Finger Sheath
Salient Full-Fingertip Haptic Feedback Enabled by Wearable Electrohydraulic Actuation
Cutaneous Electrohydraulic (CUTE) Wearable Devices for Pleasant Broad-Bandwidth Haptic Cues
Modeling Finger-Touchscreen Contact during Electrovibration
Perception of Ultrasonic Friction Pulses
Vibrotactile Playback for Teaching Sensorimotor Skills in Medical Procedures
CAPT Motor: A Two-Phase Ironless Motor Structure
4D Intraoperative Surgical Perception: Anatomical Shape Reconstruction from Multiple Viewpoints
Visual-Inertial Force Estimation in Robotic Surgery
Enhancing Robotic Surgical Training
AiroTouch: Naturalistic Vibrotactile Feedback for Large-Scale Telerobotic Assembly
Optimization-Based Whole-Arm Teleoperation for Natural Human-Robot Interaction
Finger-Surface Contact Mechanics in Diverse Moisture Conditions
Computational Modeling of Finger-Surface Contact
Perceptual Integration of Contact Force Components During Tactile Stimulation
Dynamic Models and Wearable Tactile Devices for the Fingertips
Novel Designs and Rendering Algorithms for Fingertip Haptic Devices
Dimensional Reduction from 3D to 1D for Realistic Vibration Rendering
Prendo: Analyzing Human Grasping Strategies for Visually Occluded Objects
Learning Upper-Limb Exercises from Demonstrations
Minimally Invasive Surgical Training with Multimodal Feedback and Automatic Skill Evaluation
Efficient Large-Area Tactile Sensing for Robot Skin
Haptic Feedback and Autonomous Reflexes for Upper-limb Prostheses
Gait Retraining
Modeling Hand Deformations During Contact
Intraoperative AR Assistance for Robot-Assisted Minimally Invasive Surgery
Immersive VR for Phantom Limb Pain
Visual and Haptic Perception of Real Surfaces
Haptipedia
Gait Propulsion Trainer
TouchTable: A Musical Interface with Haptic Feedback for DJs
Exercise Games with Baxter
Intuitive Social-Physical Robots for Exercise
How Should Robots Hug?
Hierarchical Structure for Learning from Demonstration
Fabrication of HuggieBot 2.0: A More Huggable Robot
Learning Haptic Adjectives from Tactile Data
Feeling With Your Eyes: Visual-Haptic Surface Interaction
S-BAN
General Tactile Sensor Model
Insight: a Haptic Sensor Powered by Vision and Machine Learning
Robust and Affordable Haptic Sensation with Sparse Sensor Configuration
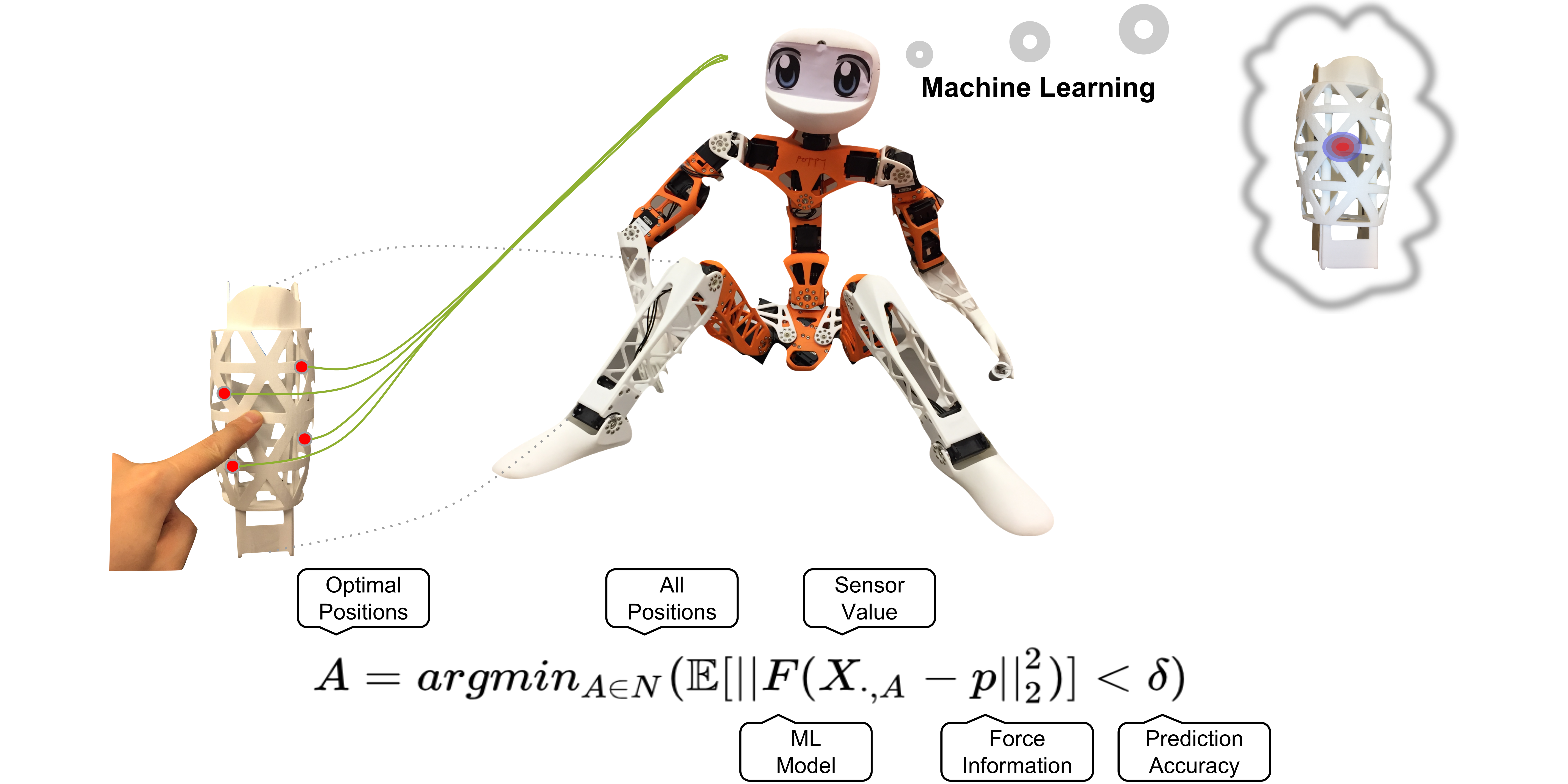
During the rapid development of robot technologies, actuators and sensors have become increasingly compact and powerful. Nevertheless, robots are still far from matching human capabilities especially when it comes to touch sensation. For this, haptic sensors have to be robust to sustain long-lasting experiments. Besides robustness, another important aspect of robotic hardware is its price, availability, and performance. A low cost makes robotic technologies widely accessible and thus facilitates research.
In this project, we aim at providing a low-cost, robust and sufficiently precise method for inferring haptic forces on the surface of 3D robot limbs. Instead of applying dense array-shaped sensors, we opt for a small number of sensors measuring internal deformation. This offers a couple of conceptual advantages: (1) The system is robust to environmental impacts because sensors are placed internally; (2) The surface shape can be freely designed; (3) Only a few channels have to be read out which reduces both the energy consumption and the data rate. On the downside, a measurement of the sensors does not directly correspond to the impacting force. Instead, an inference mechanism is required to estimate the force. We propose a data-driven approach using machine learning algorithms to perform this inference efficiently. To require as few sensors as possible, we employ several optimization schemes to determine optimal sensor placement.
The contributions of this project [![]() ] are as follows: On the theory side, we propose a new way of implementing a whole surface haptic sensor and provide a method for determining the optimal number and position of sensors using finite element method. On the application side, we provide a method to assemble the strain gauges, designed a hardware system to systematically collect data and demonstrated the sensing system on a robotic limb.
] are as follows: On the theory side, we propose a new way of implementing a whole surface haptic sensor and provide a method for determining the optimal number and position of sensors using finite element method. On the application side, we provide a method to assemble the strain gauges, designed a hardware system to systematically collect data and demonstrated the sensing system on a robotic limb.
Members

Publications