Human Pose, Shape and Action
3D Pose from Images
2D Pose from Images
Beyond Motion Capture
Action and Behavior
Body Perception
Body Applications
Pose and Motion Priors
Clothing Models (2011-2015)
Reflectance Filtering
Learning on Manifolds
Markerless Animal Motion Capture
Multi-Camera Capture
2D Pose from Optical Flow
Body Perception
Neural Prosthetics and Decoding
Part-based Body Models
Intrinsic Depth
Lie Bodies
Layers, Time and Segmentation
Understanding Action Recognition (JHMDB)
Intrinsic Video
Intrinsic Images
Action Recognition with Tracking
Neural Control of Grasping
Flowing Puppets
Faces
Deformable Structures
Model-based Anthropometry
Modeling 3D Human Breathing
Optical flow in the LGN
FlowCap
Smooth Loops from Unconstrained Video
PCA Flow
Efficient and Scalable Inference
Motion Blur in Layers
Facade Segmentation
Smooth Metric Learning
Robust PCA
3D Recognition
Object Detection
Object Detection
Object detection for real world applications is still a challenging problem. While increased data can partly solve the problem, the ability of detectors to process large data sets in reasonable time becomes another important issue besides accuracy.
A family of methods that can handle large amount of training data efficiently, and that are inherently suited for multi-class problems, are based on random forests, which are ensembles of randomized decision trees that can be applied to regression or classification tasks. Since object detection involves both classifying patches belonging to an object and using them to regress the location and scale of the object, random forests for object detection need to be trained to satisfy both objectives [![]() ].
].
While object detection based on Hough forests allows parts observed in different training instances to support a single object hypothesis, it also produces false positives by accumulating votes that are consistent in location but inconsistent in other properties like pose, color, shape or type. To address this problem, Hough forests can be augmented with latent variables in order to enforce consistency among votes [![]() ]. To this end, only votes that agree on the assignment of the latent variable are allowed to support a single hypothesis.
]. To this end, only votes that agree on the assignment of the latent variable are allowed to support a single hypothesis.
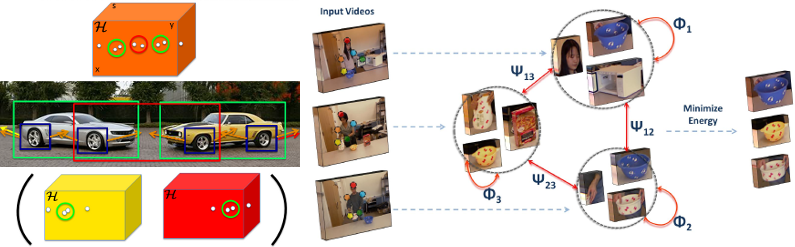
In order to avoid an expensive manual labeling process, or to learn object classes autonomously without human intervention, we propose a framework for object discovery in activity-labeled videos [![]() ]. Since small objects like pens are difficult to discover only based on appearance, we introduce similarity based on object functionality, which can be estimated from relative human-object motion during the activity. We show that functionality is an important cue for discovering objects from activities in RGB(D) video datasets.
]. Since small objects like pens are difficult to discover only based on appearance, we introduce similarity based on object functionality, which can be estimated from relative human-object motion during the activity. We show that functionality is an important cue for discovering objects from activities in RGB(D) video datasets.
Members


Publications